课程知识

计算机安全与取证之哈希函数和公钥加密
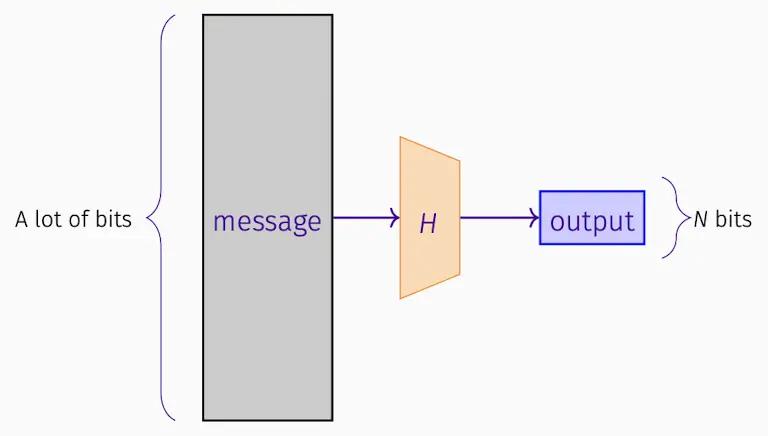
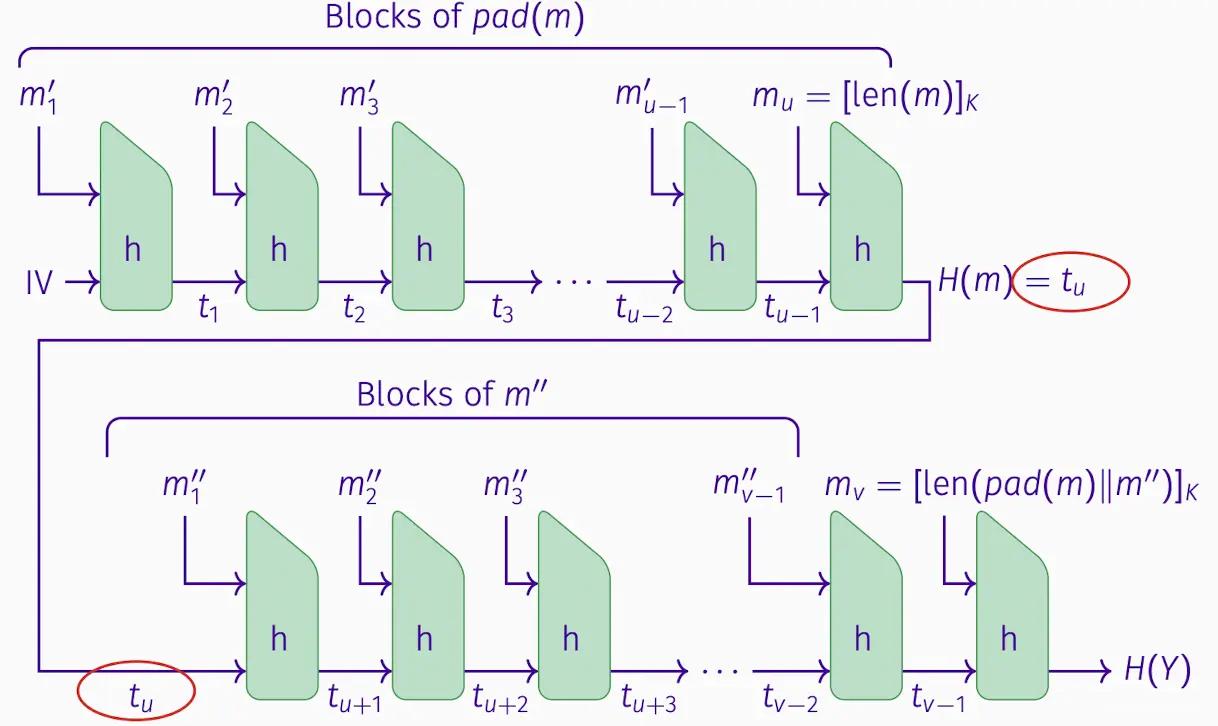
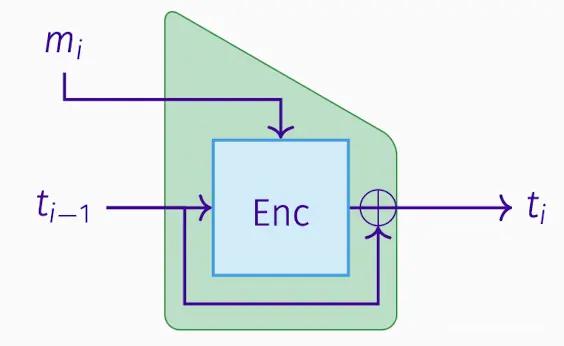
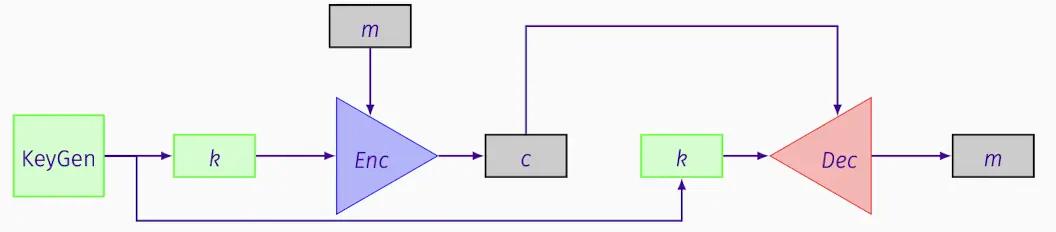
! 哈希函数是一种将任意长度输入字符串映射到固定长度哈希值(有时称为消息摘要)的高效可计算函数。不管输入几位,输出都是 N bits。
哈希函数不是 keyed primitive 基于密钥的原语。
包括 message fingerprinting 消息指纹生成…

计算机安全与取证之操作模式和填充 Oracle 攻击
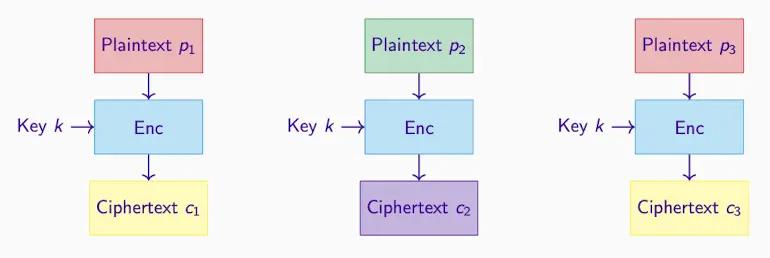
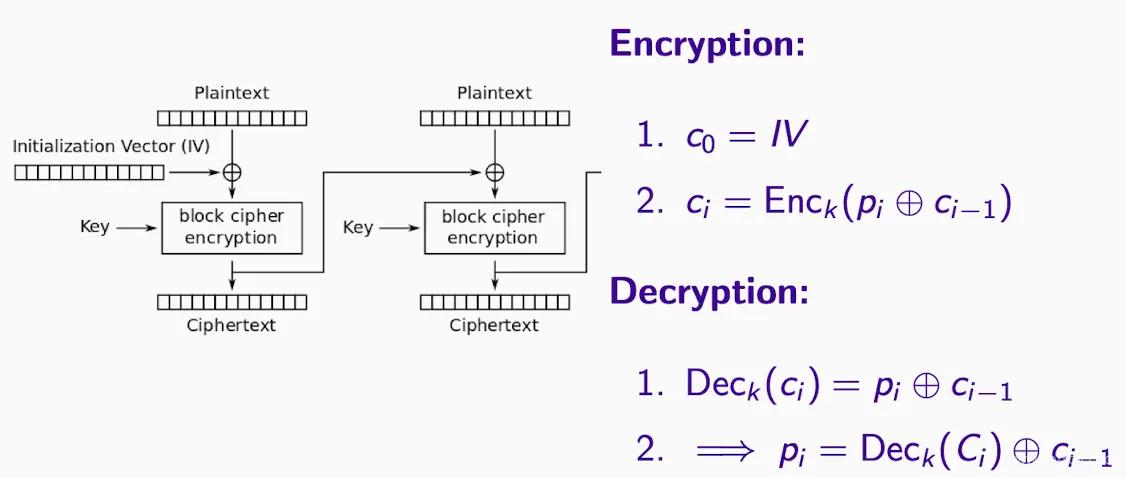
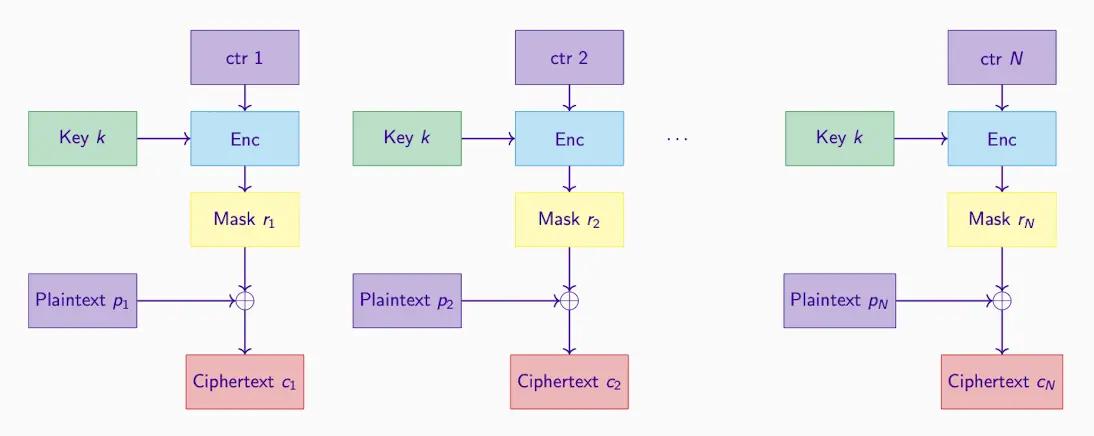
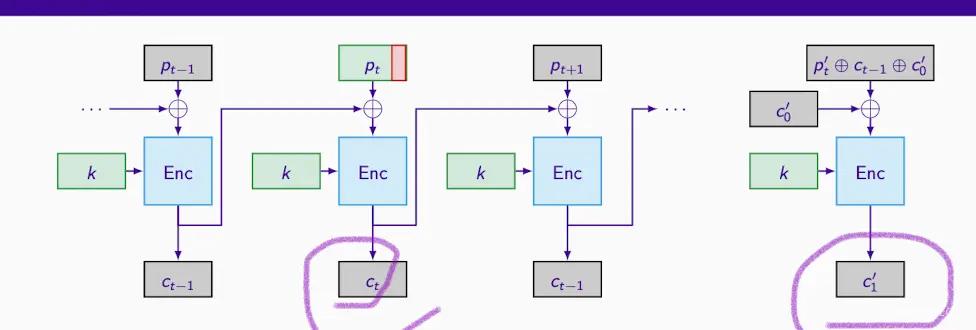
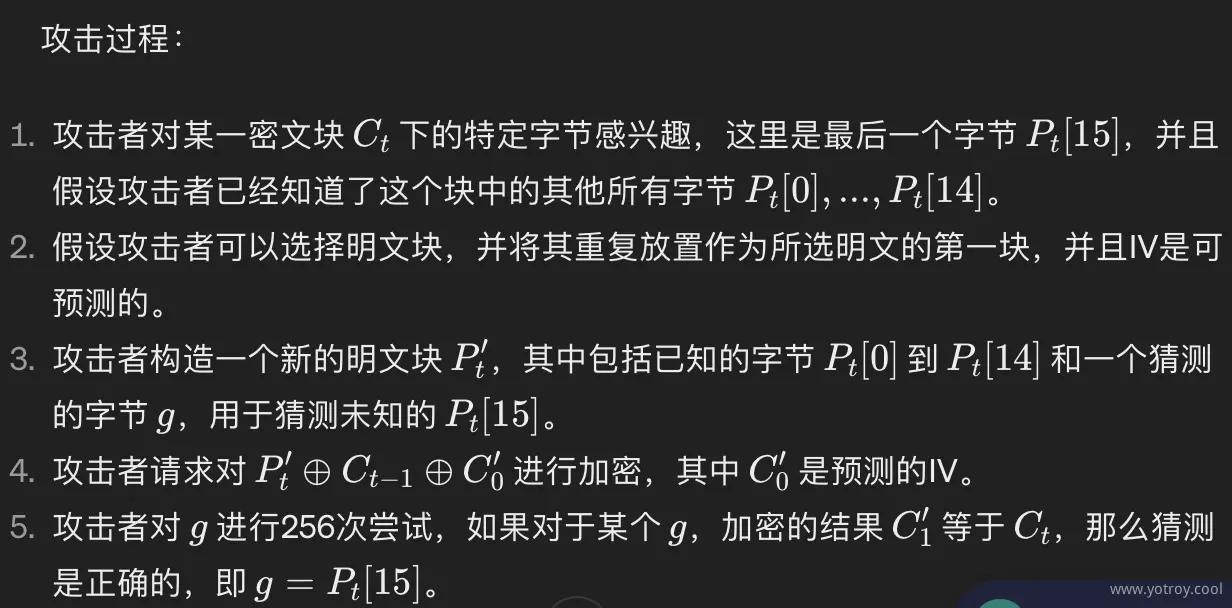
对称加密算法(如 AES)也就是加密和解密过程使用相同的密钥 key。本身只能安全加密固定大小的数据块。为了加密任意长度的消息,需要将这些基本算法运用在特定的操作模式中。 一个块状密码可加密 N bit 的信息。如果不是 N 的整数倍,不是固定长度,或者类似 TCP 流呢?…


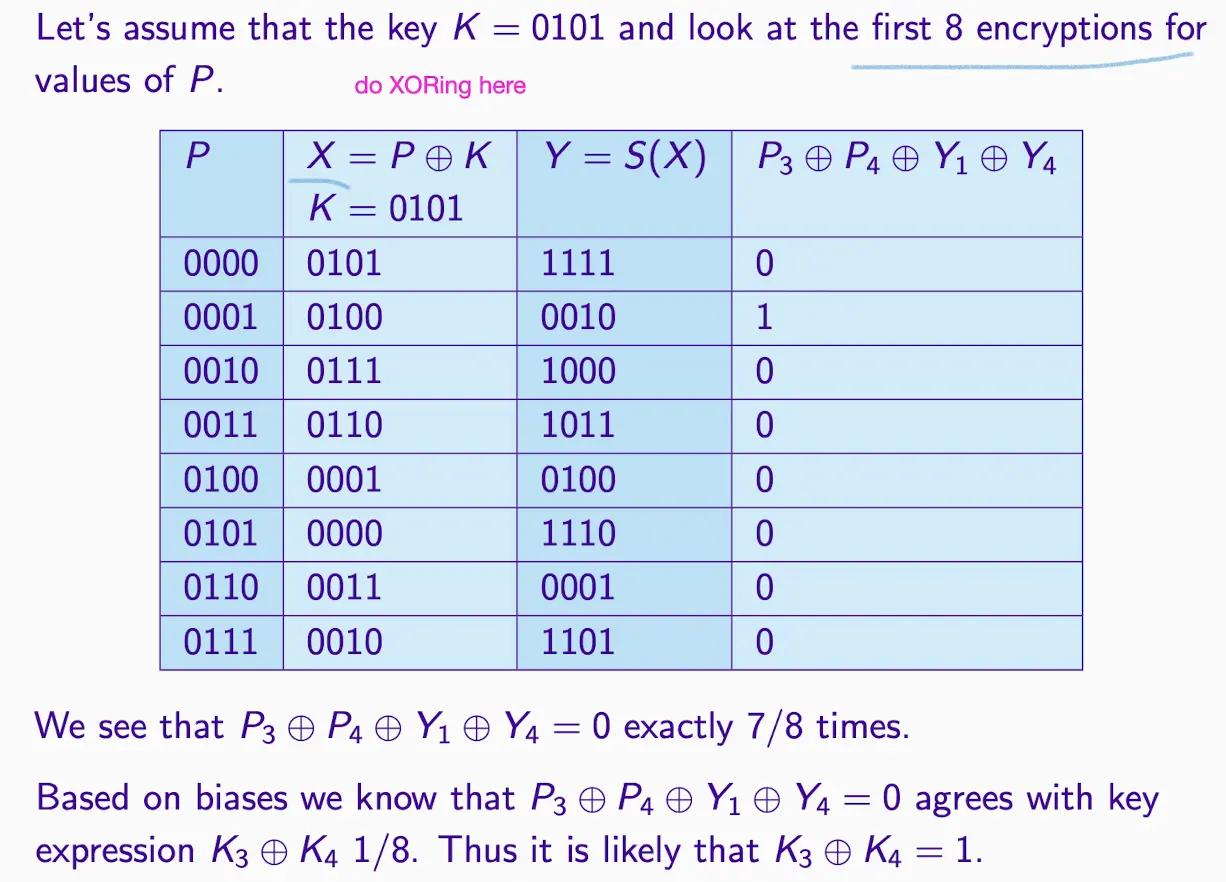
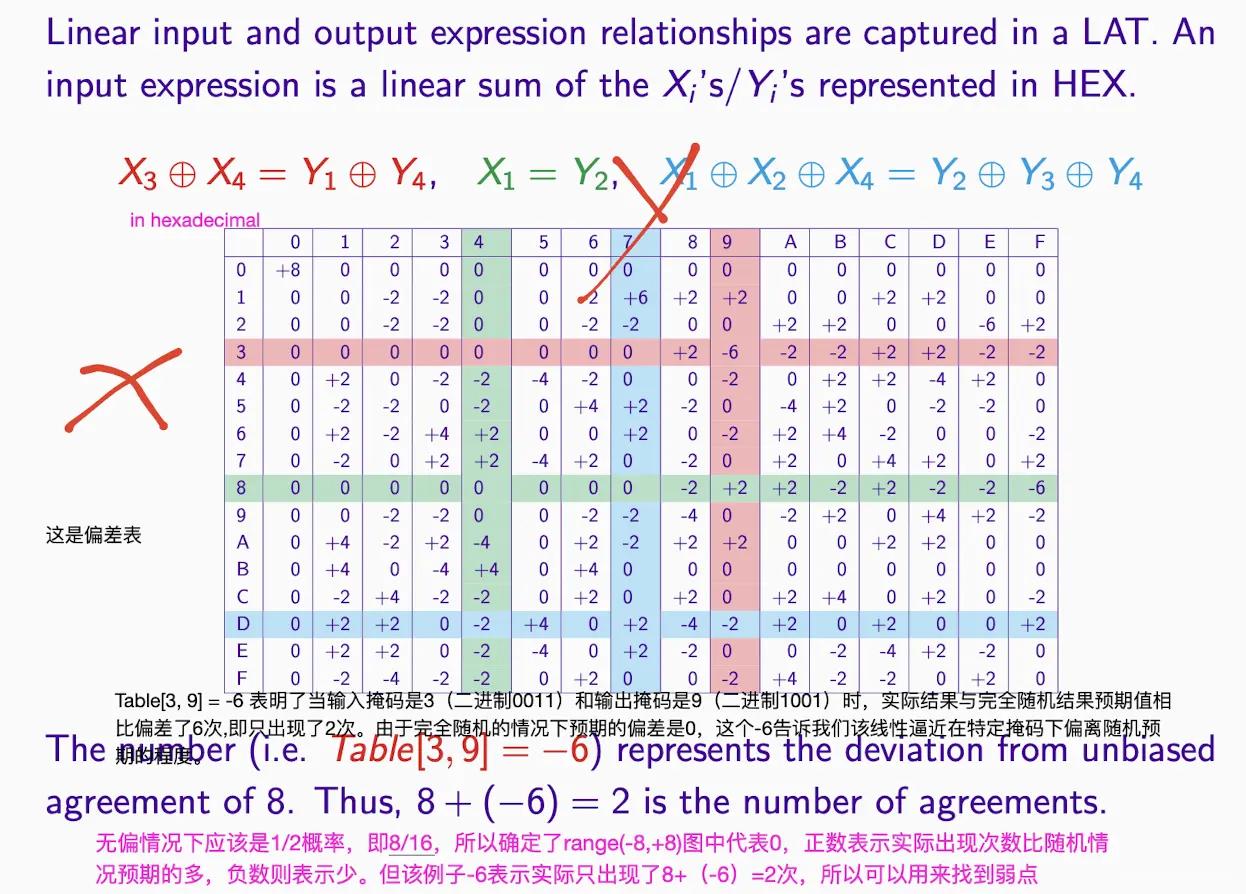
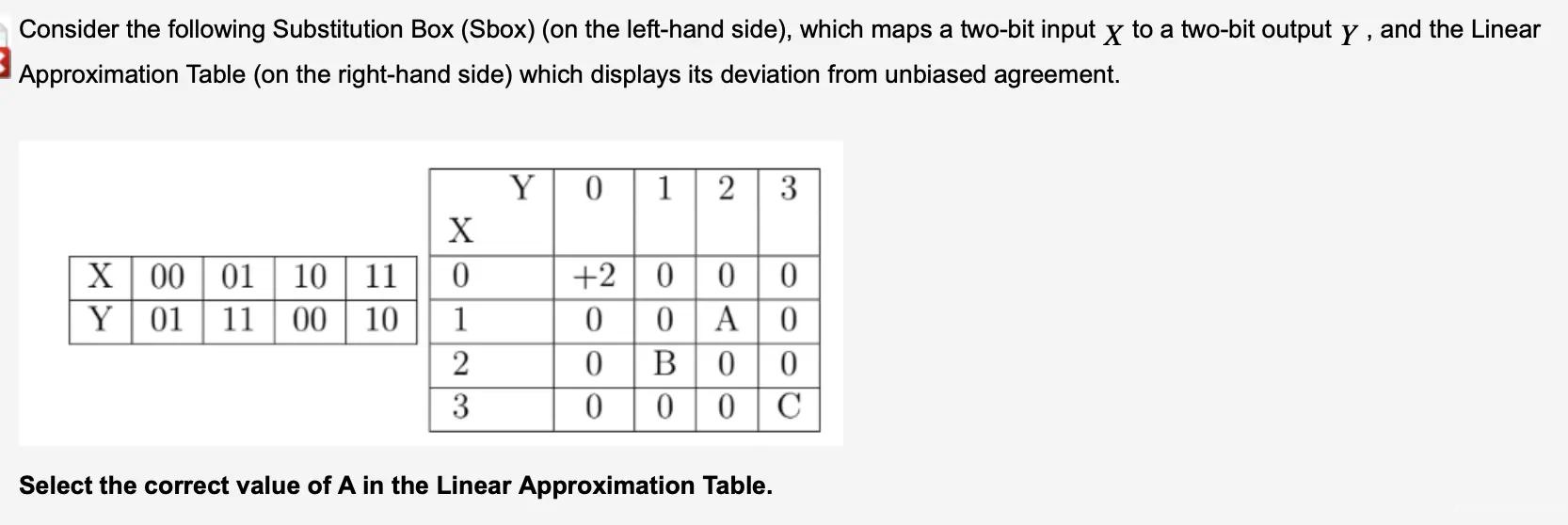
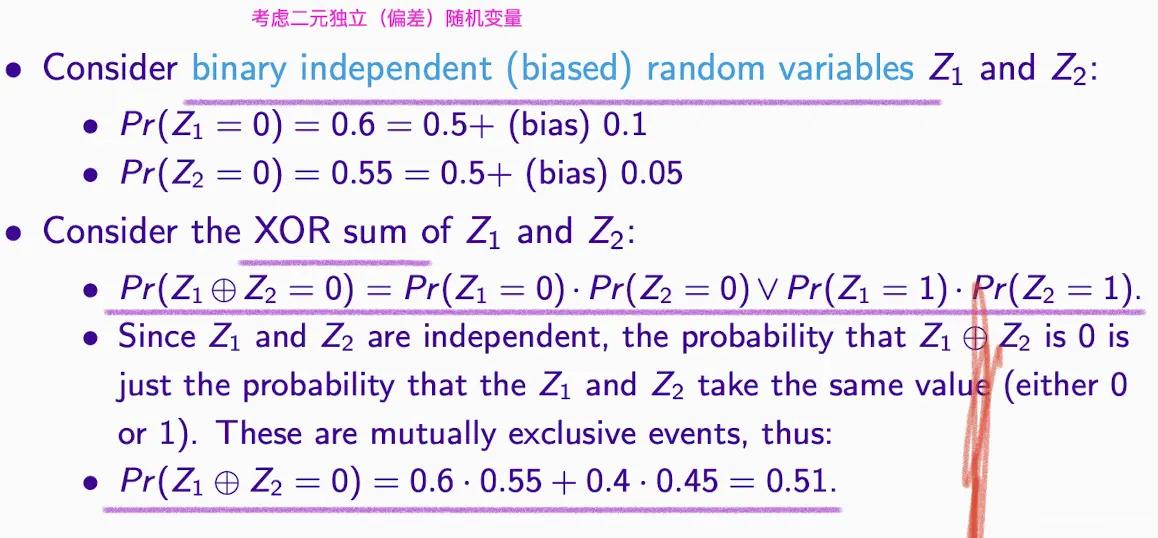
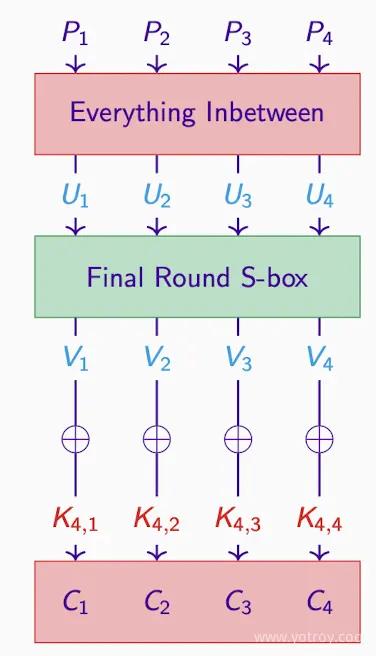
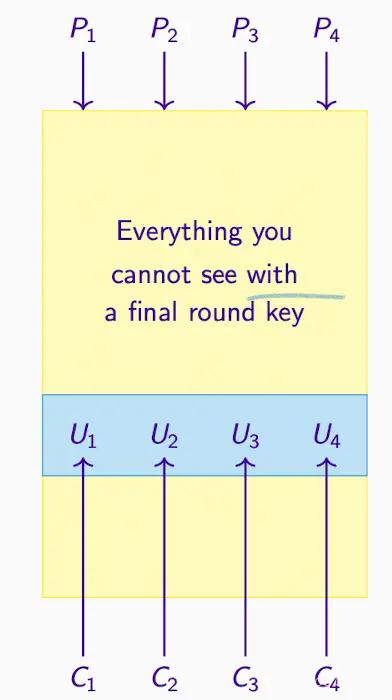
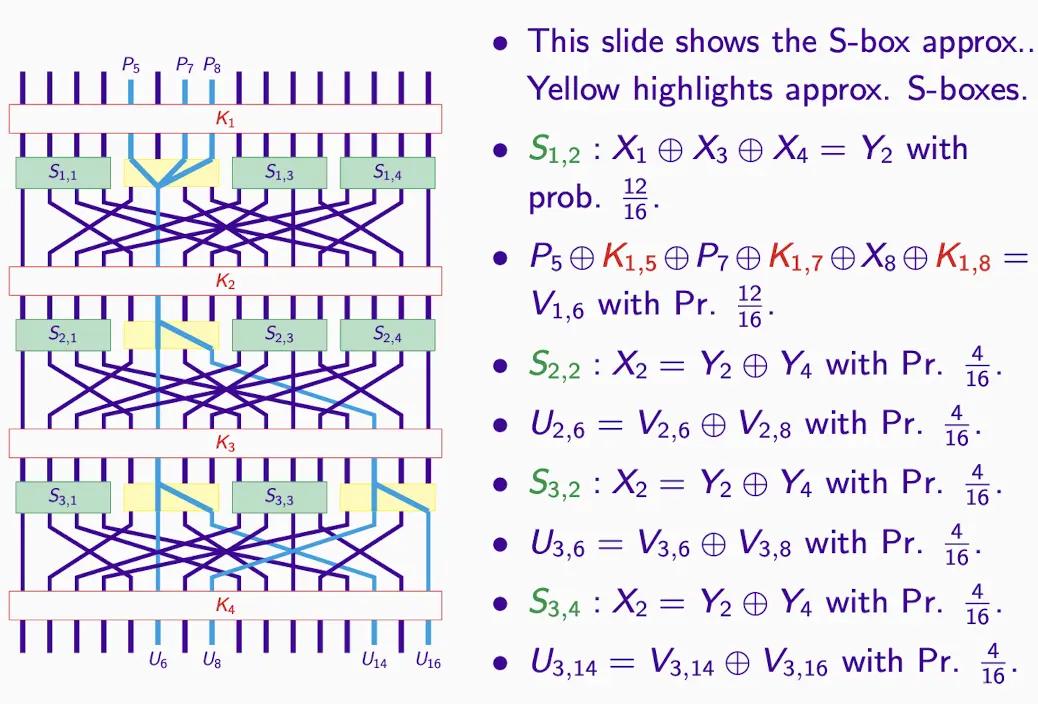
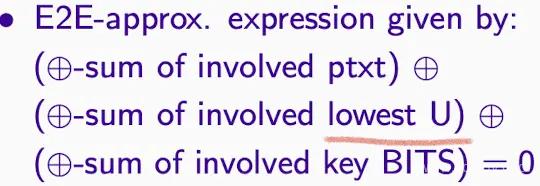

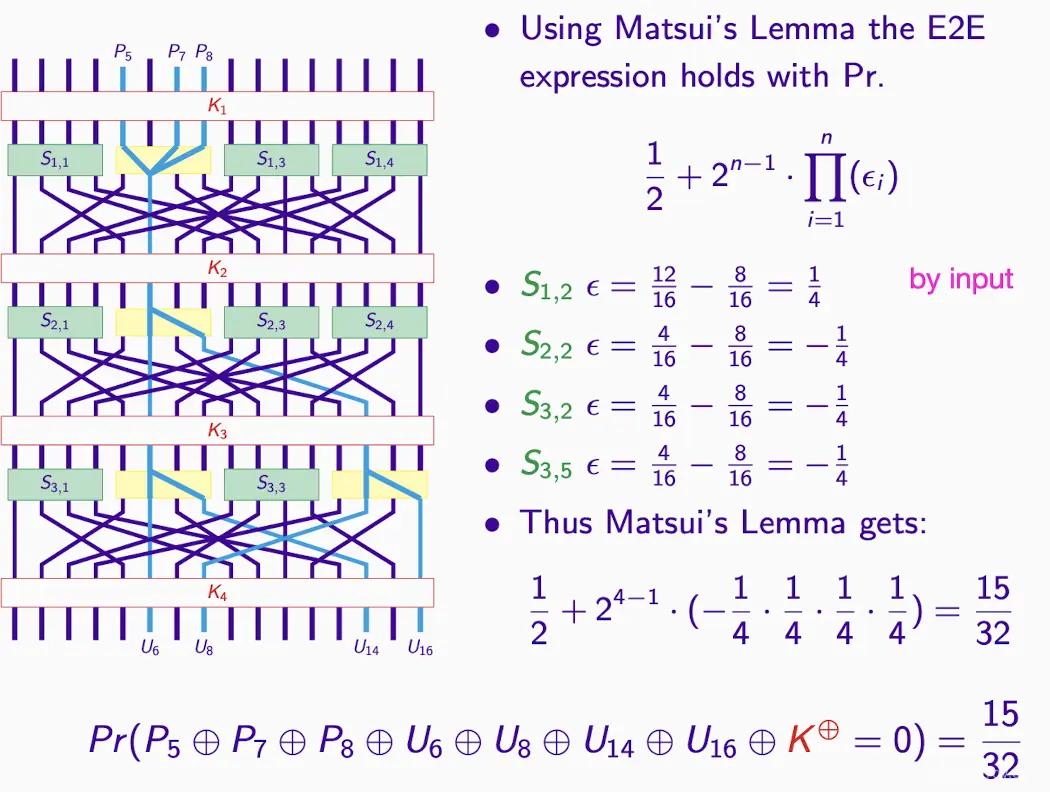
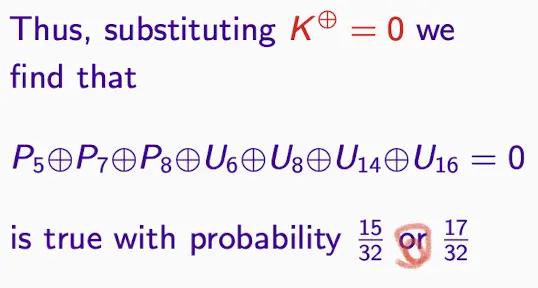
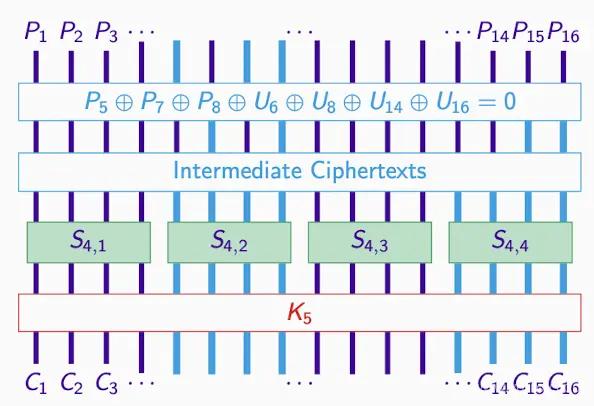
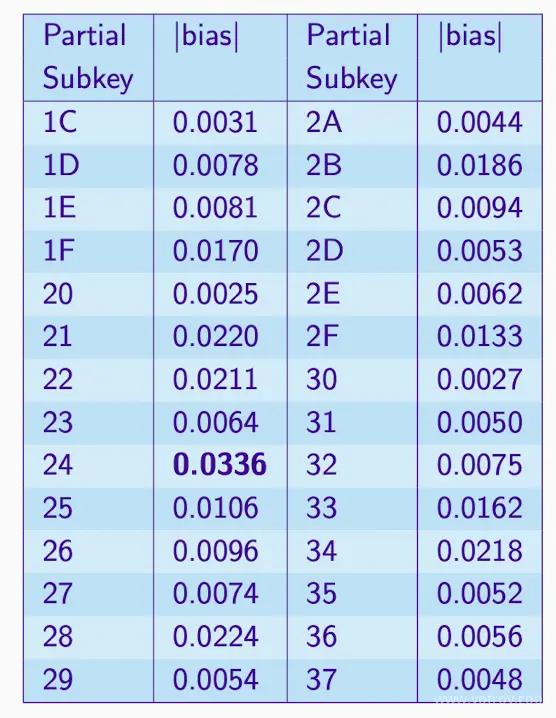
计算机安全与取证之线性密码分析
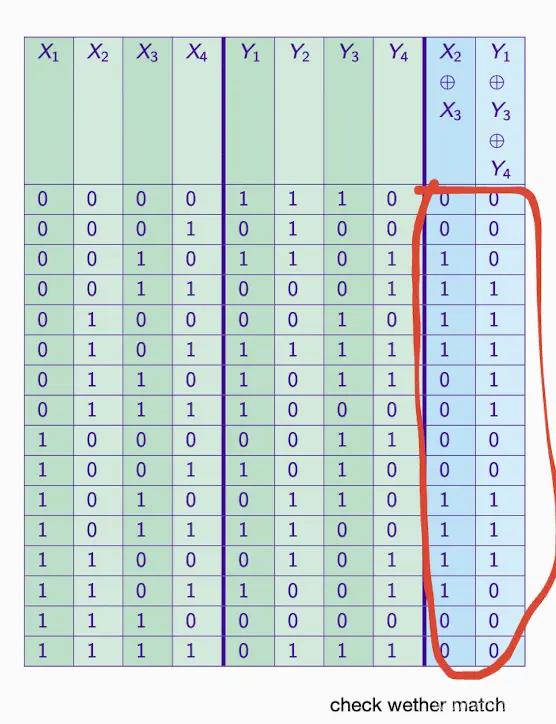
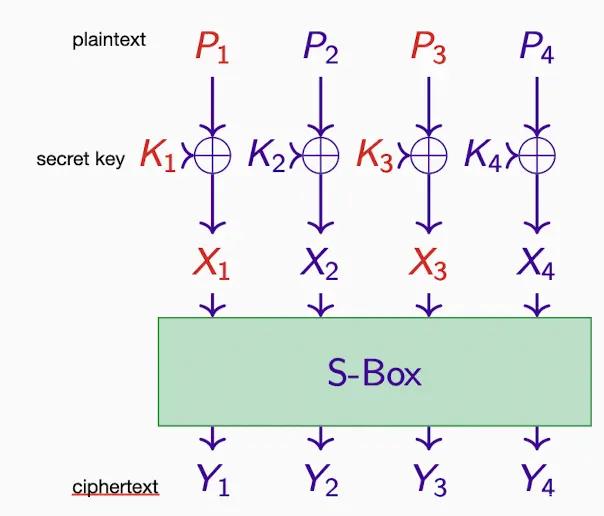
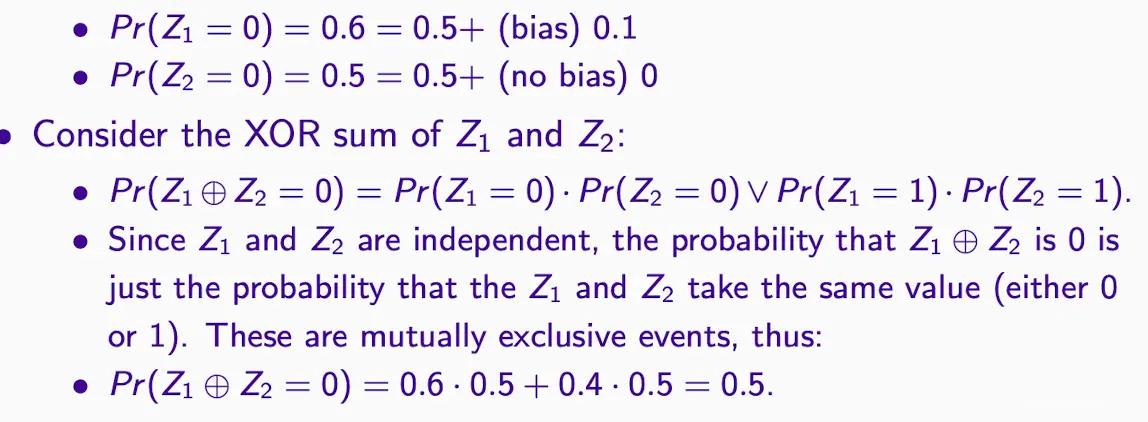
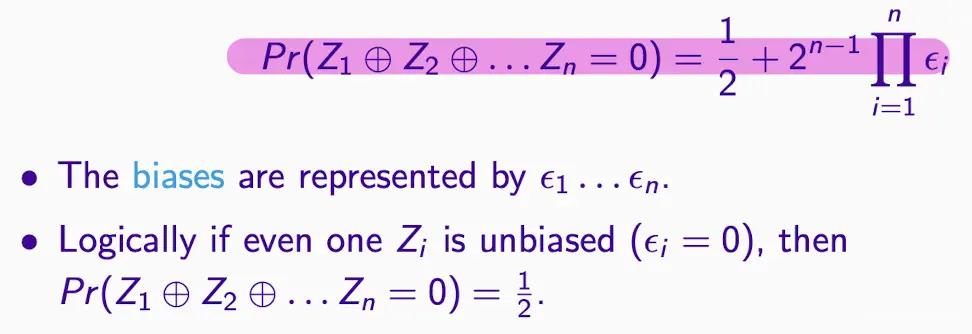
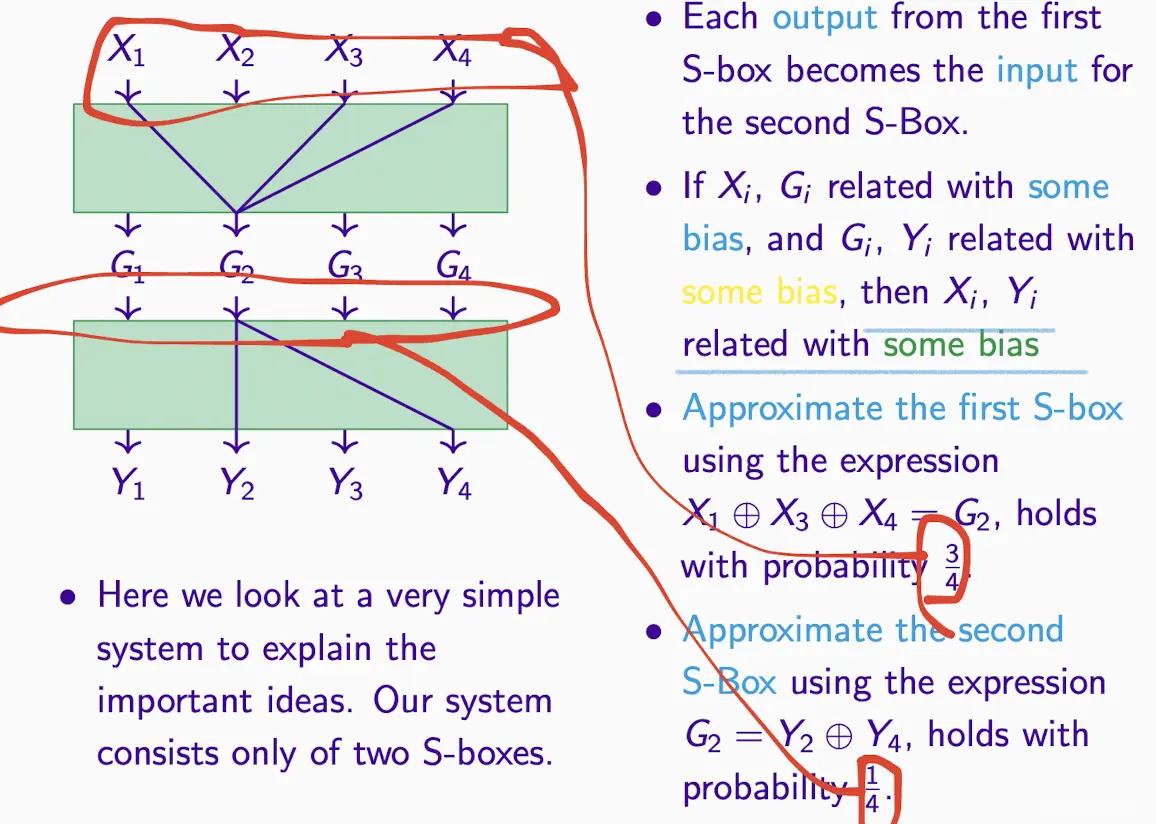
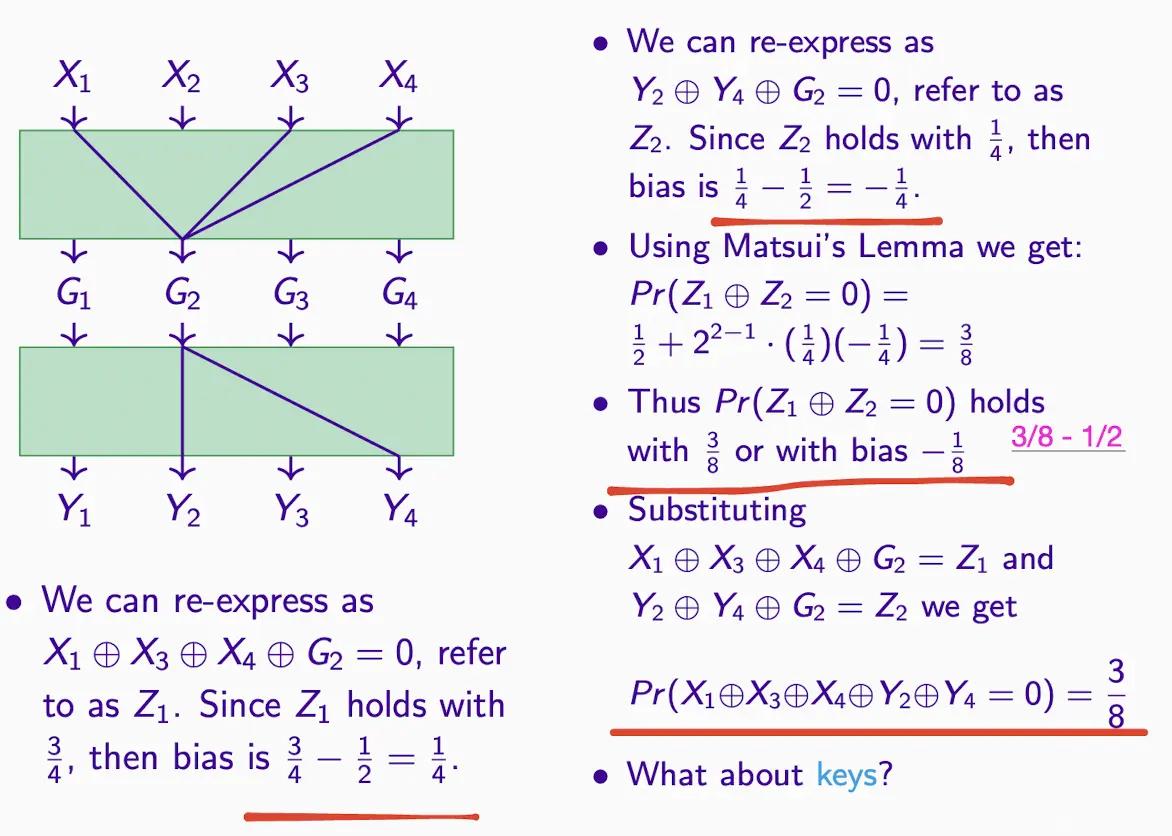
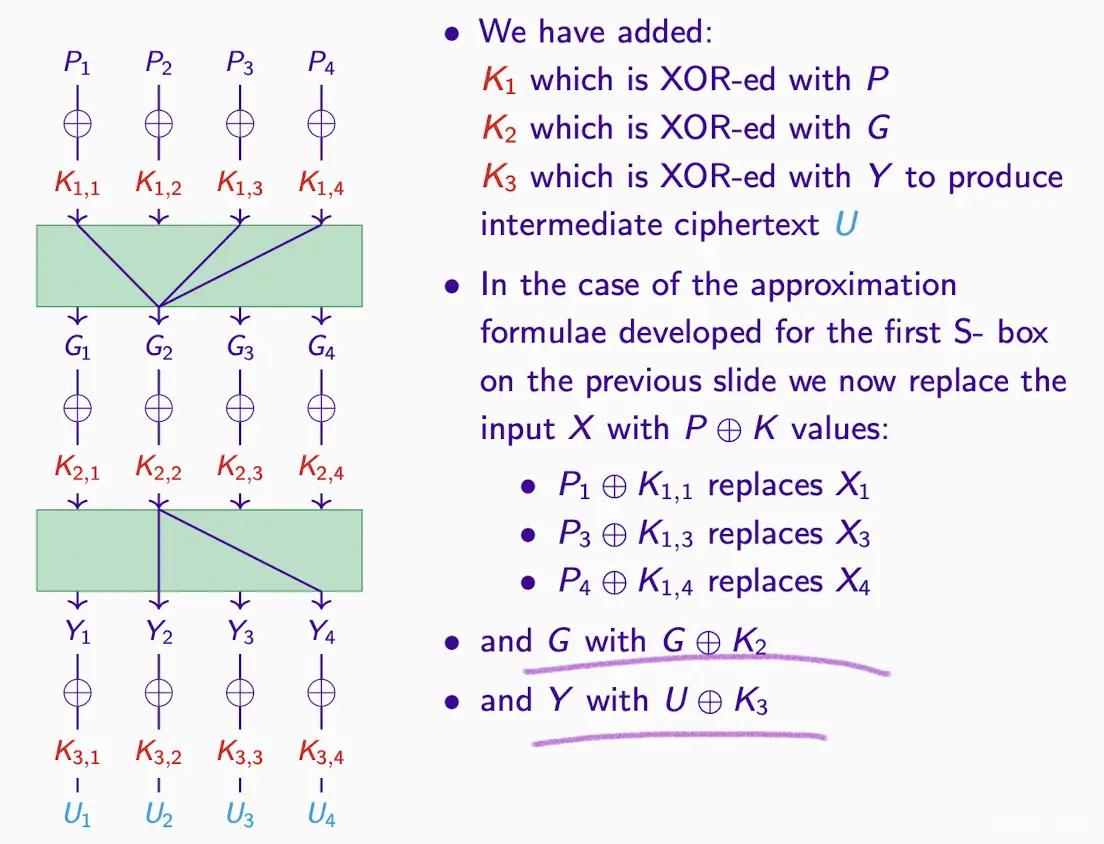
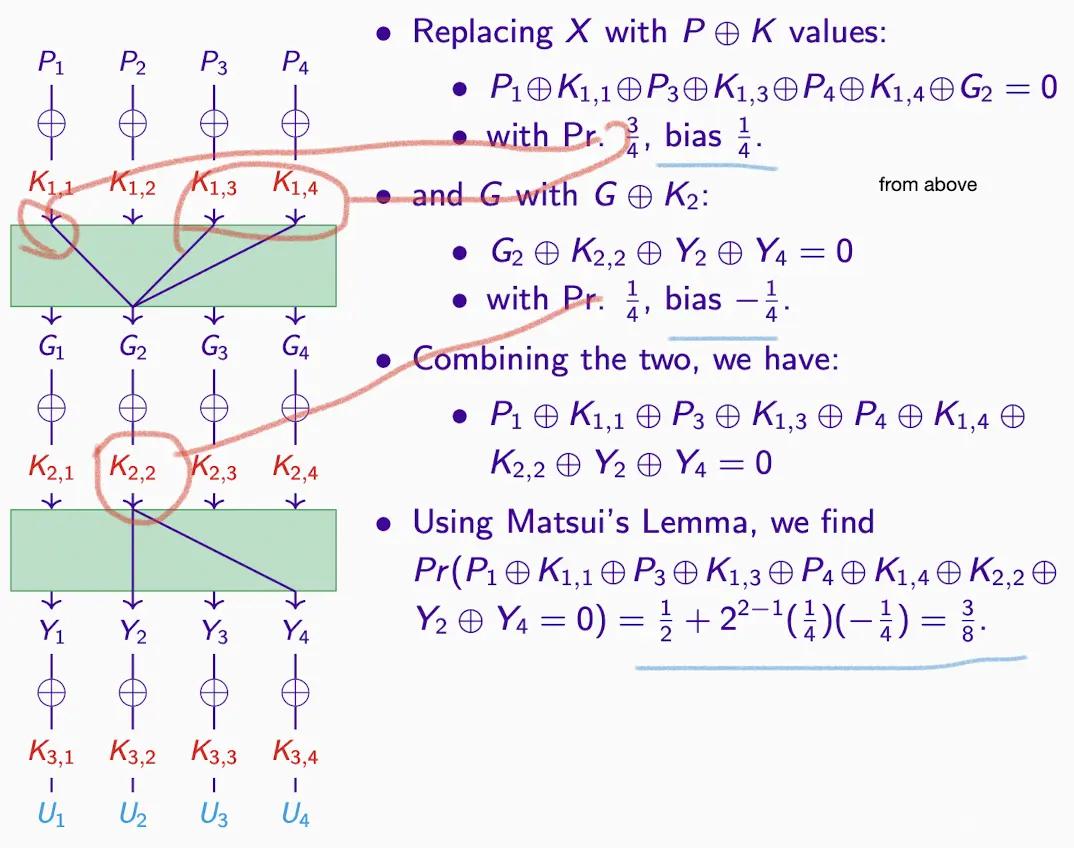
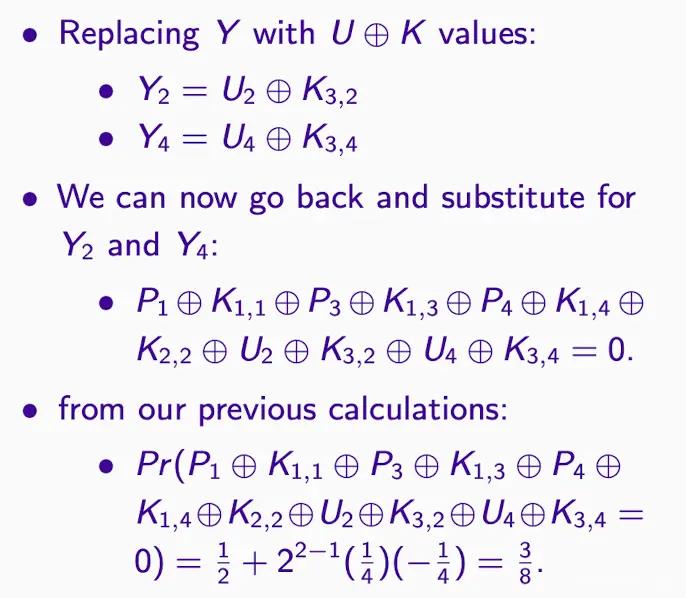
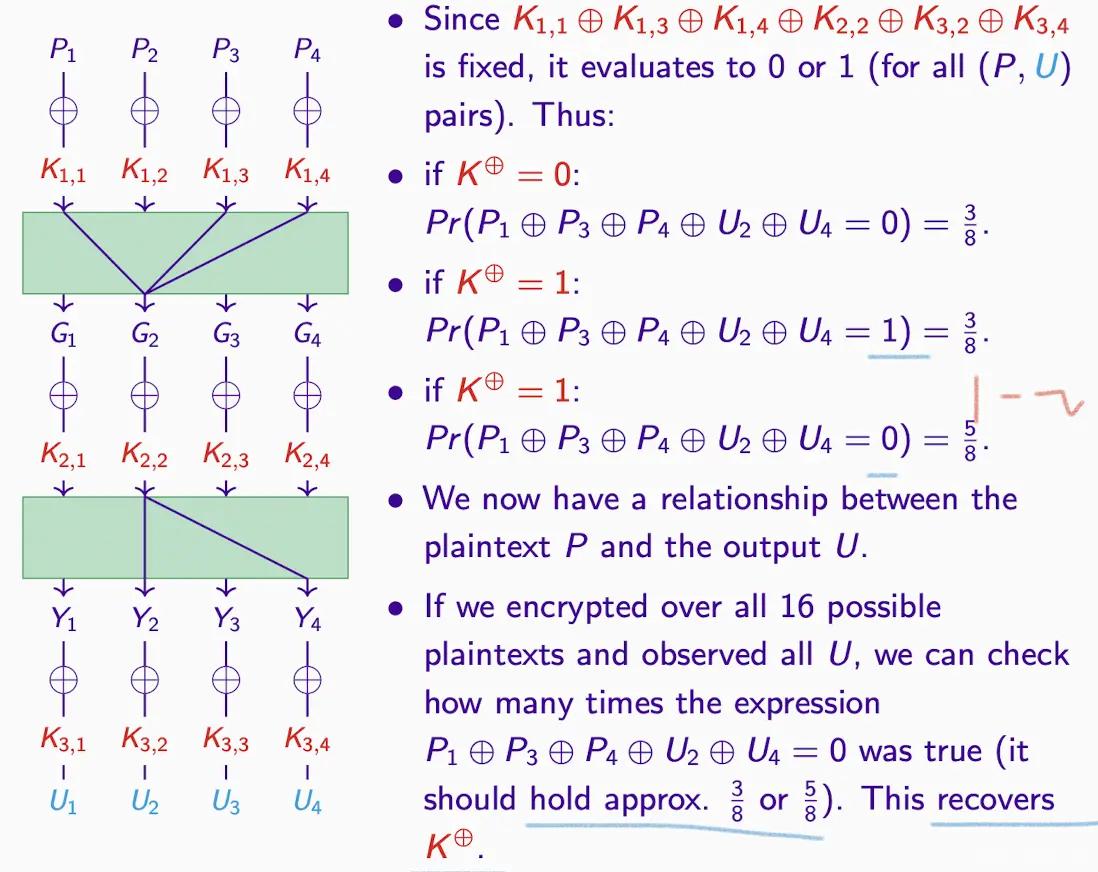
XOR 是 “异或” 运算的简称,是一种基本的位运算。它的运算规则是对两个比特位进行比较,如果两个比特位相同,则结果是 0;如果两个比特位不同,则结果是 1。 因为≠ 0.5,所以是有信息的。那么即使只有一个子集的值,也能以大致相同的方式利用偏差。甚至 0.5000001。…
ROS1 基础及常用指令 笔记
roslaunch# launch multiple ROS Nodes via launch files.
Copy
roslaunch {package name} {launch file}
roslaunch turtlebot3_gazebo turtlebot3…
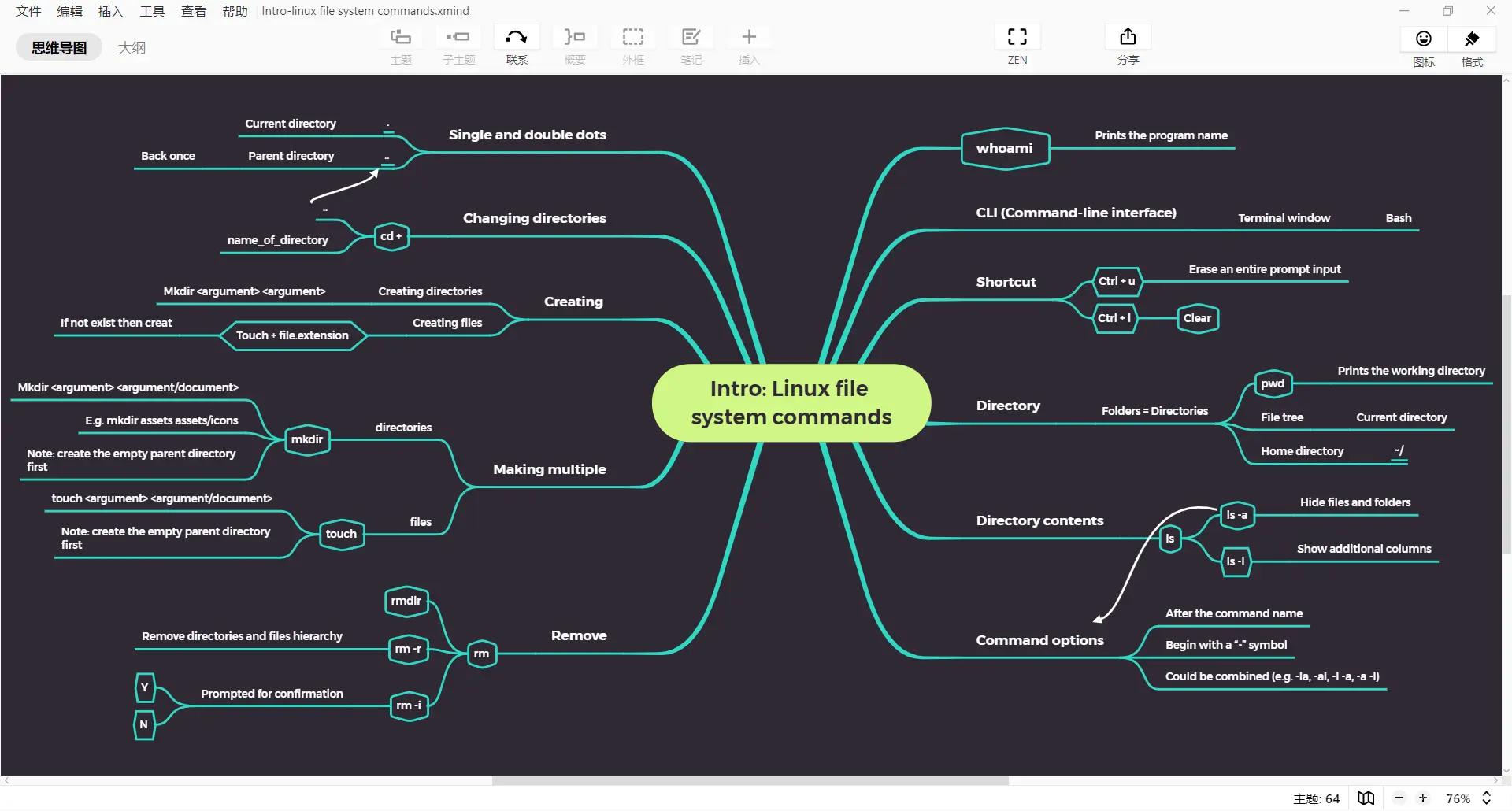
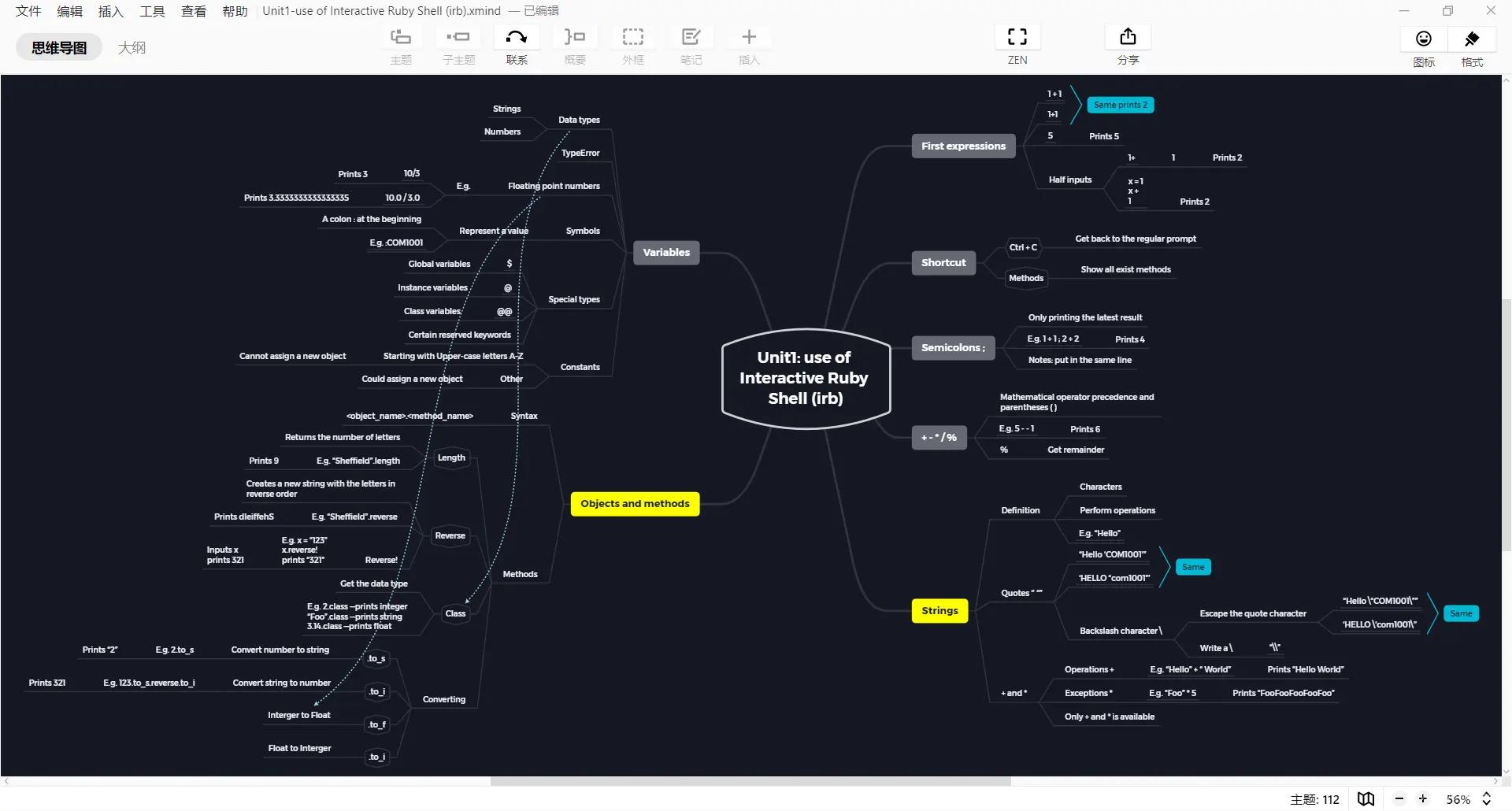
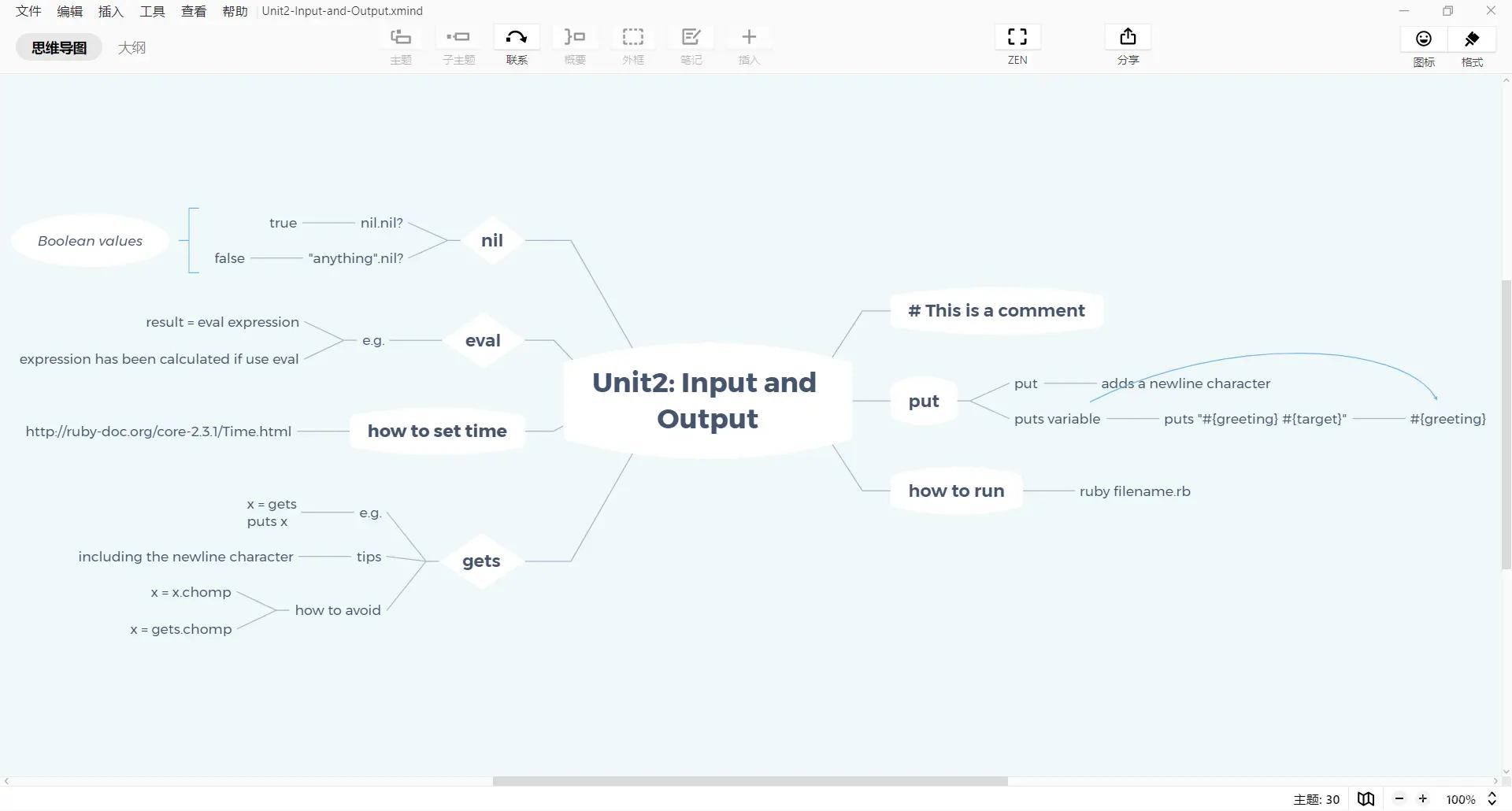

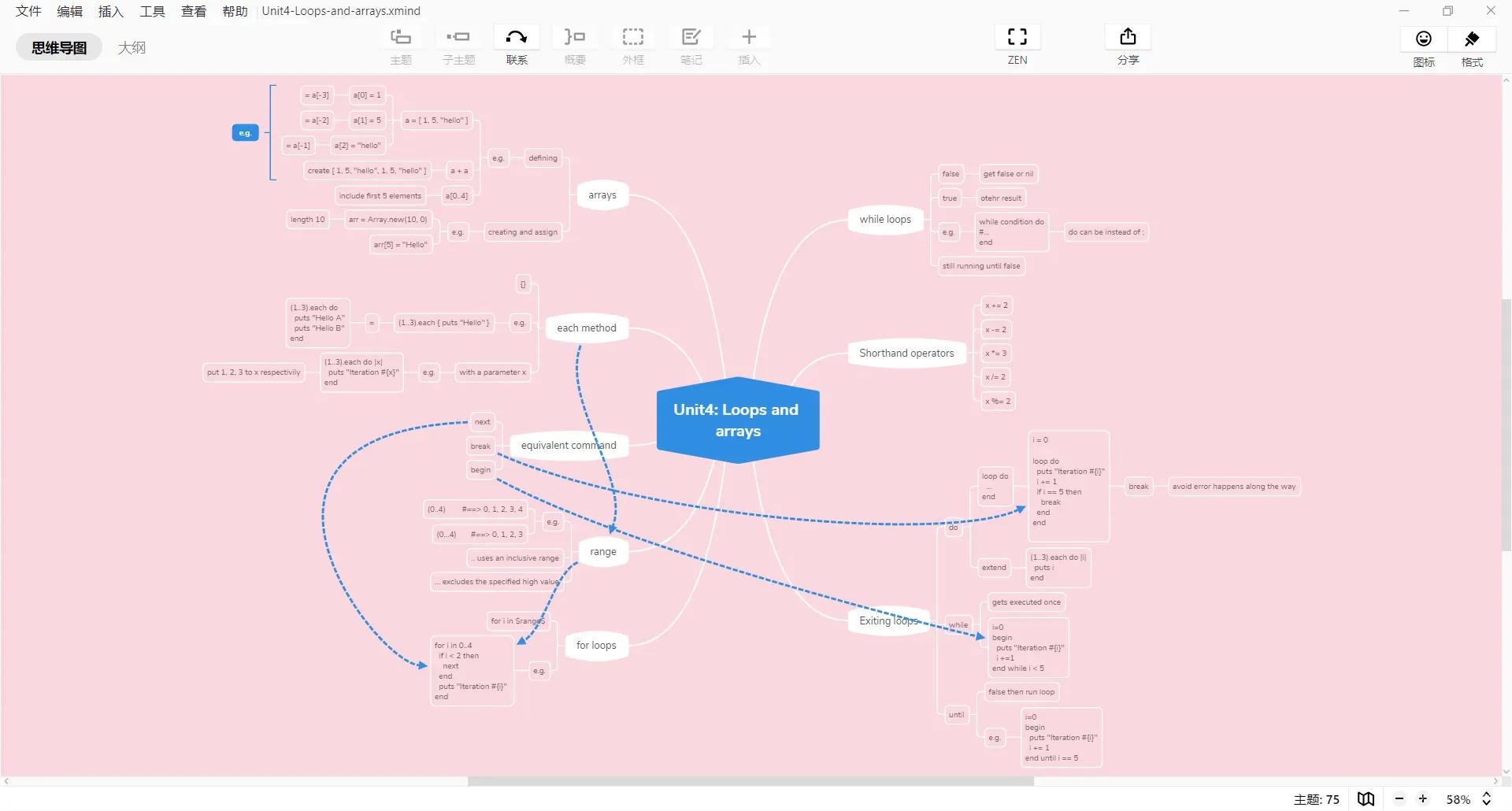
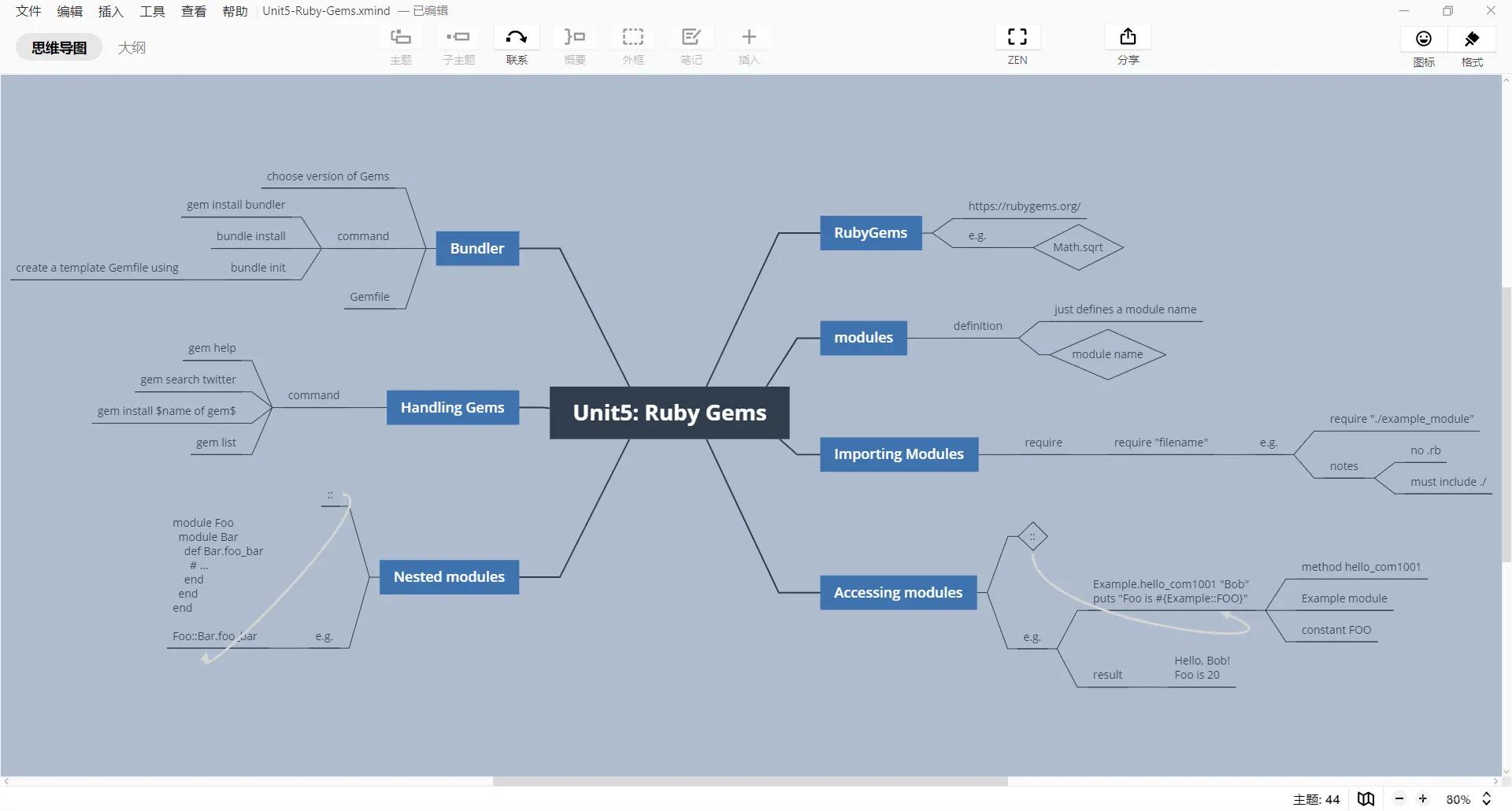
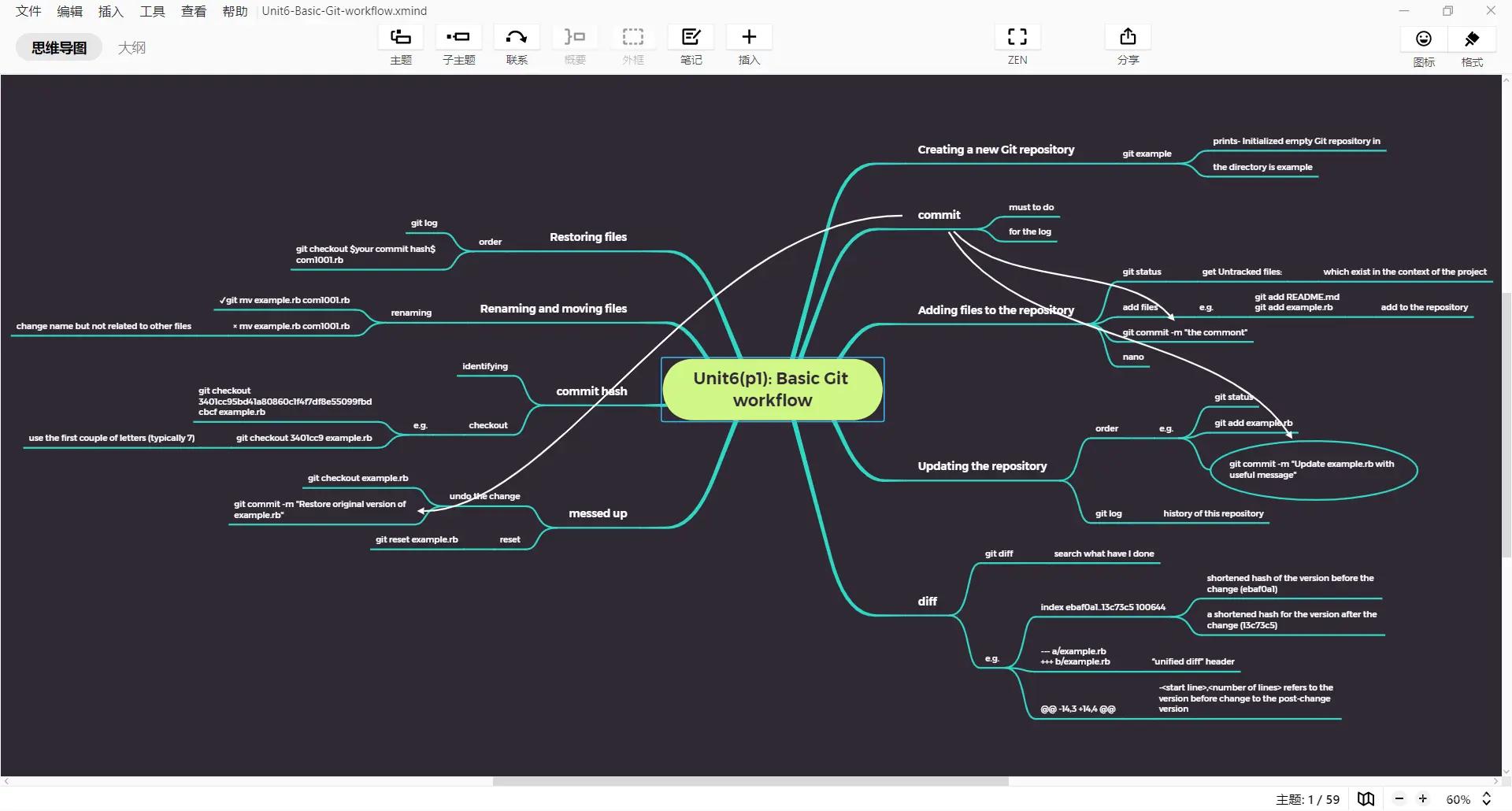
Ruby&Linux&git入门学习思维导图整理
废话 整理了一份非系统性的 Ruby&Linux&git 入门的思维导图,是根据Introduction to Software Engineering学科课程整理的,因为学科一部分是编程语言 Ruby 的学习,但更多是项目的实践,所以学习内容较杂乱,包括了最常见的 linux…