Linux
Linux如何设置开启启动命令
示例 假设我想让我的 Linux 设备启动时自启动两条指令:
Copy
cd /test
nohup python3 -m http.server 6666
❗tips: 为什么用 nohup,因为 nohup 是静默指令不会输出指令到终端,运行 log 会储存在 /test…
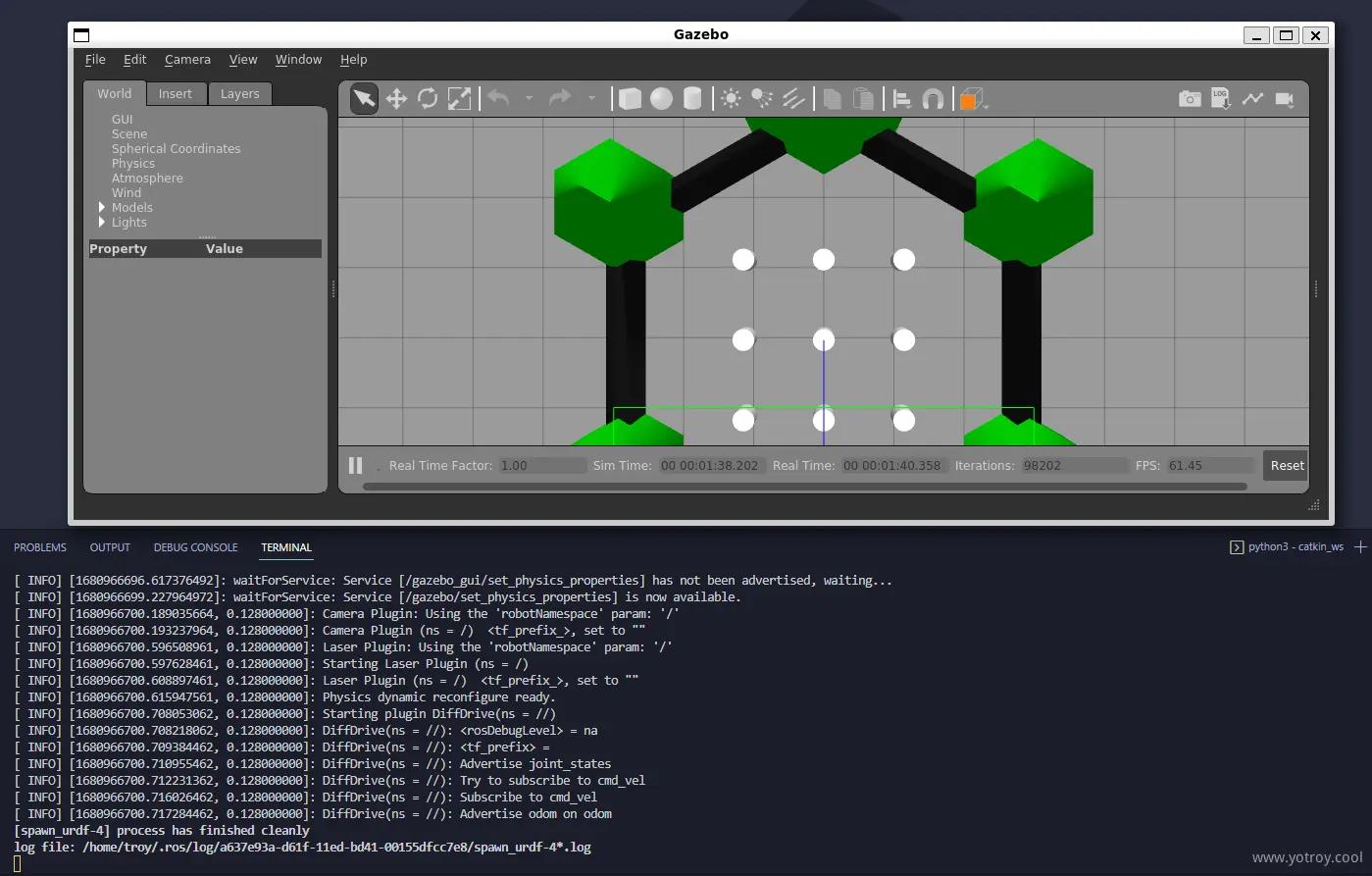
ROS1 基础及常用指令 笔记
roslaunch# launch multiple ROS Nodes via launch files.
Copy
roslaunch {package name} {launch file}
roslaunch turtlebot3_gazebo turtlebot3…
记一次zsh安装 terminal美化过程
前言# terminal 太丑了怎么办?功能不全怎么办?用zsh!
环境:Ubuntu 22.04
zsh 安装#
以下指令查看是否已安装 zsh:
Copy
zsh --version
若输出类似zsh 5.8.1 (x86_64-ubuntu-linux-gnu)则已安装…
远程服务器ssh连接
.pem? 是连接远程服务器的私钥,一般置于.ssh/下
如何连接?
Copy
ssh -i {.pem文件} {username}@{ip地址}
Error
WARNING: UNPROTECTED PRIVATE KEY FILE!
文件权限错误,应改为只读
Copy
chmo…
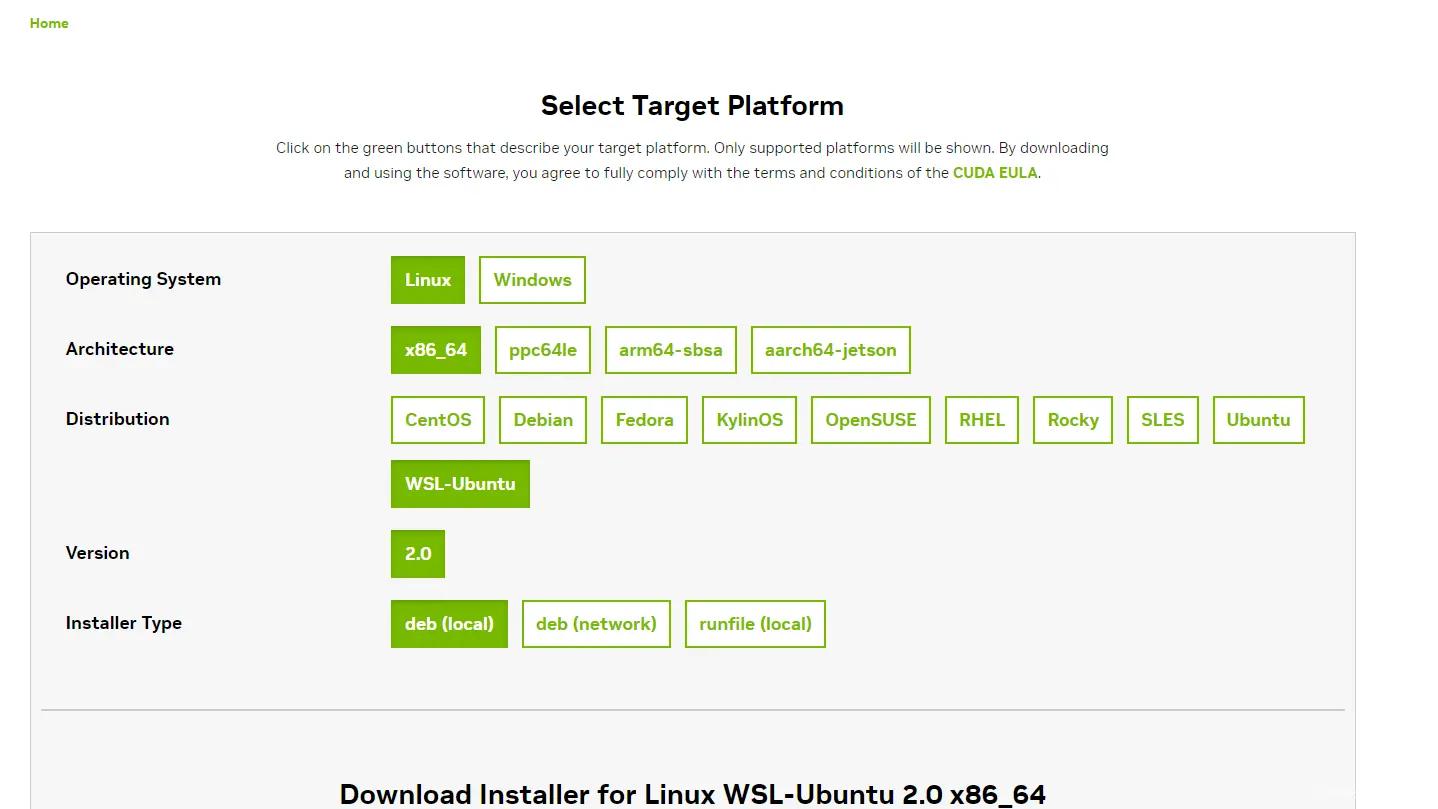
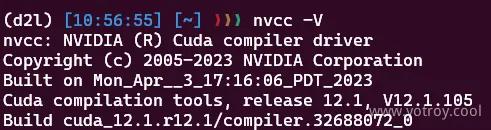

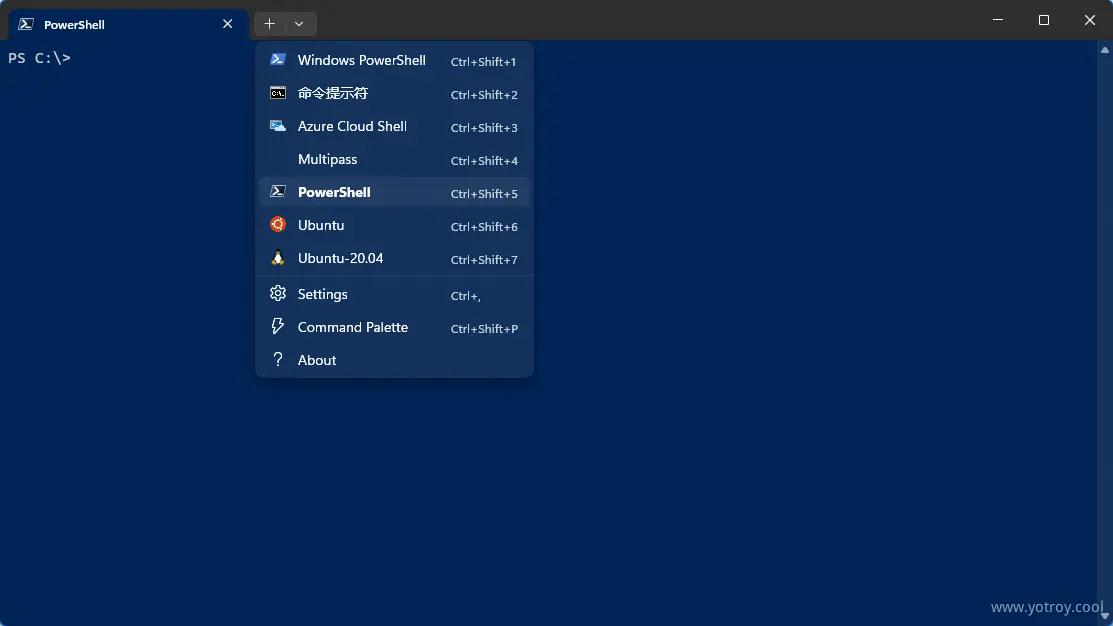
WSL安装CUDA独显 PyTorch 深度学习环境配置,测速为什么要用WSL?
易错点在在CUDA的bash配置遗漏和PyTorch版本上,要开始秃头了
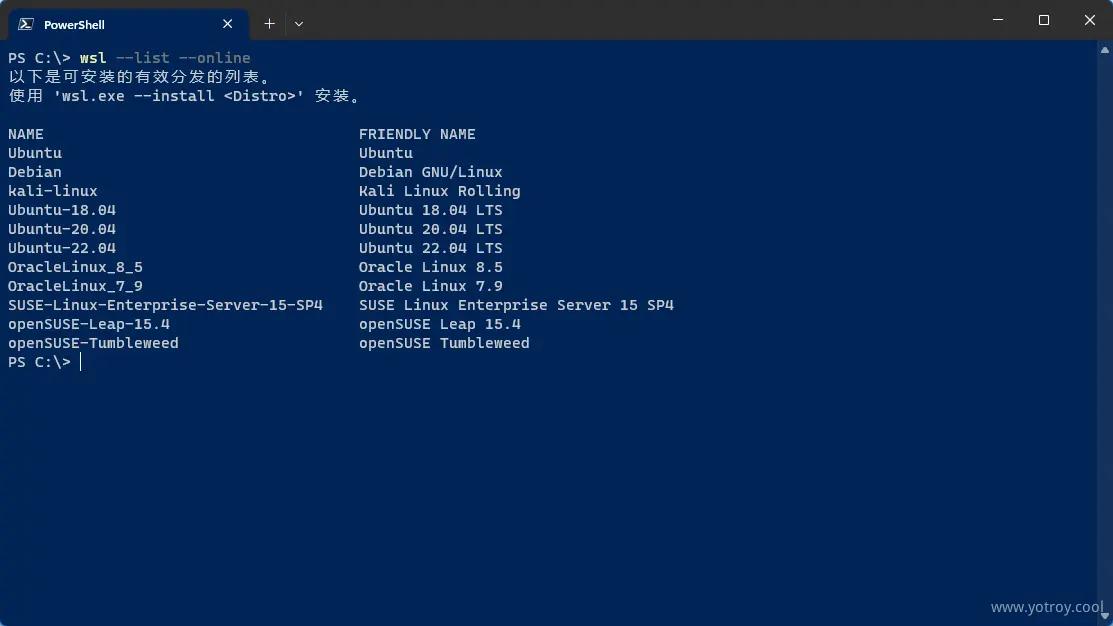

ROS1 安装 ubuntu22.04 遇到的问题 404 Not Found & TURTLEBOT3_MODEL
环境 Windows 11 安装的 wsl-ubuntu
Error: jammy Release 404 Not Found
Copy
Err:10 http://packages.ros.org/ros/ubuntu jammy Release 404 Not Found…
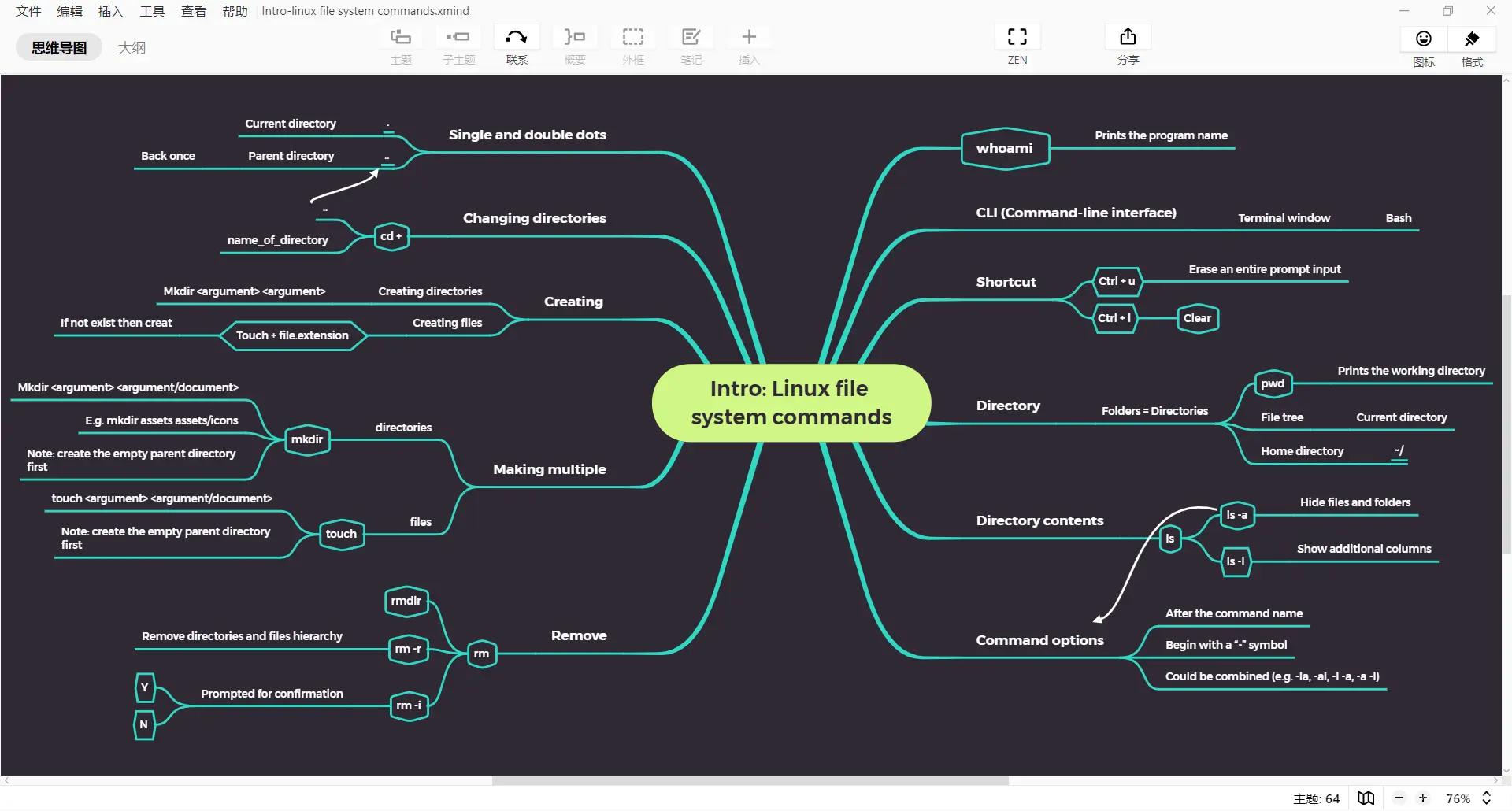
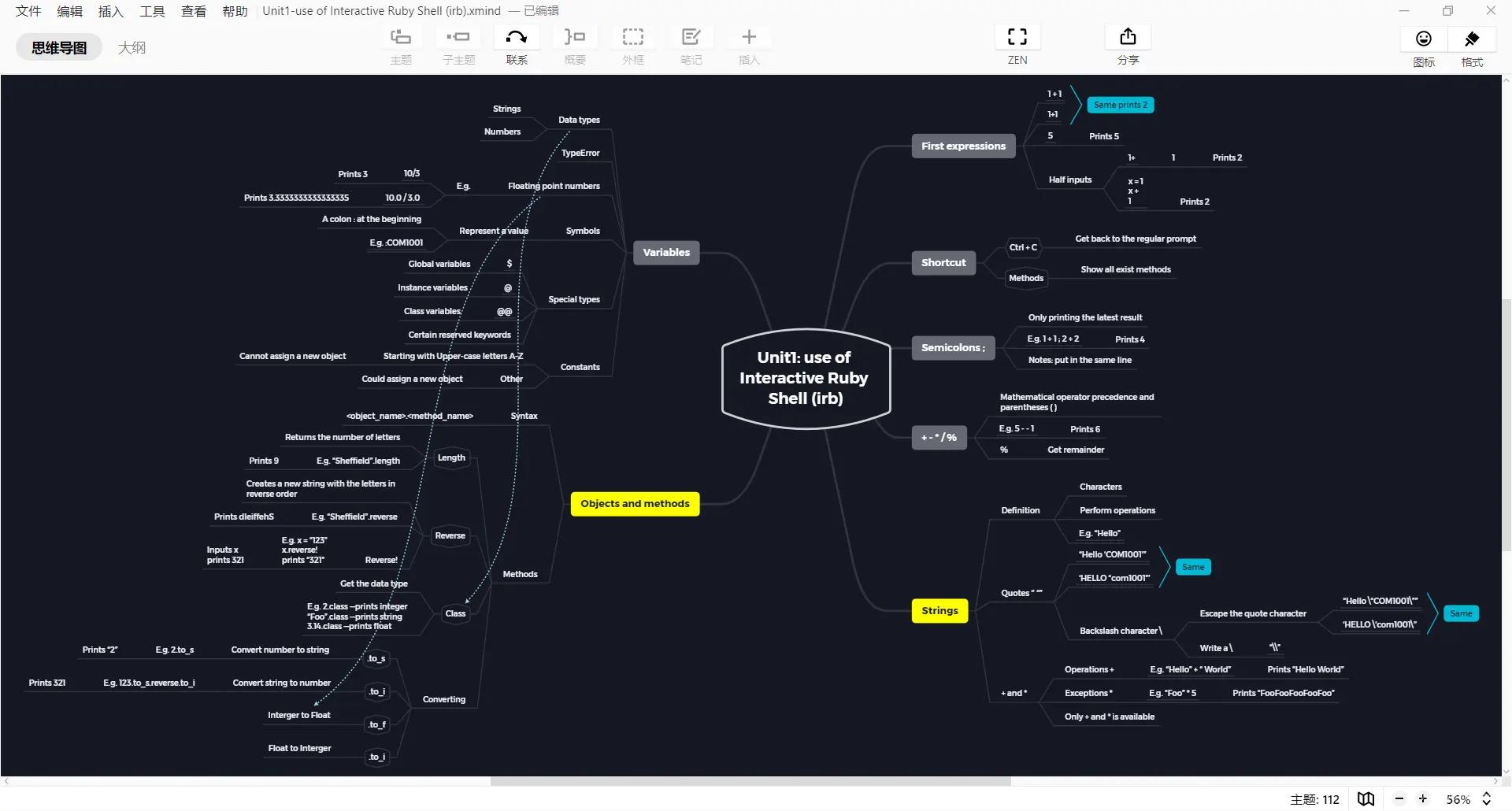
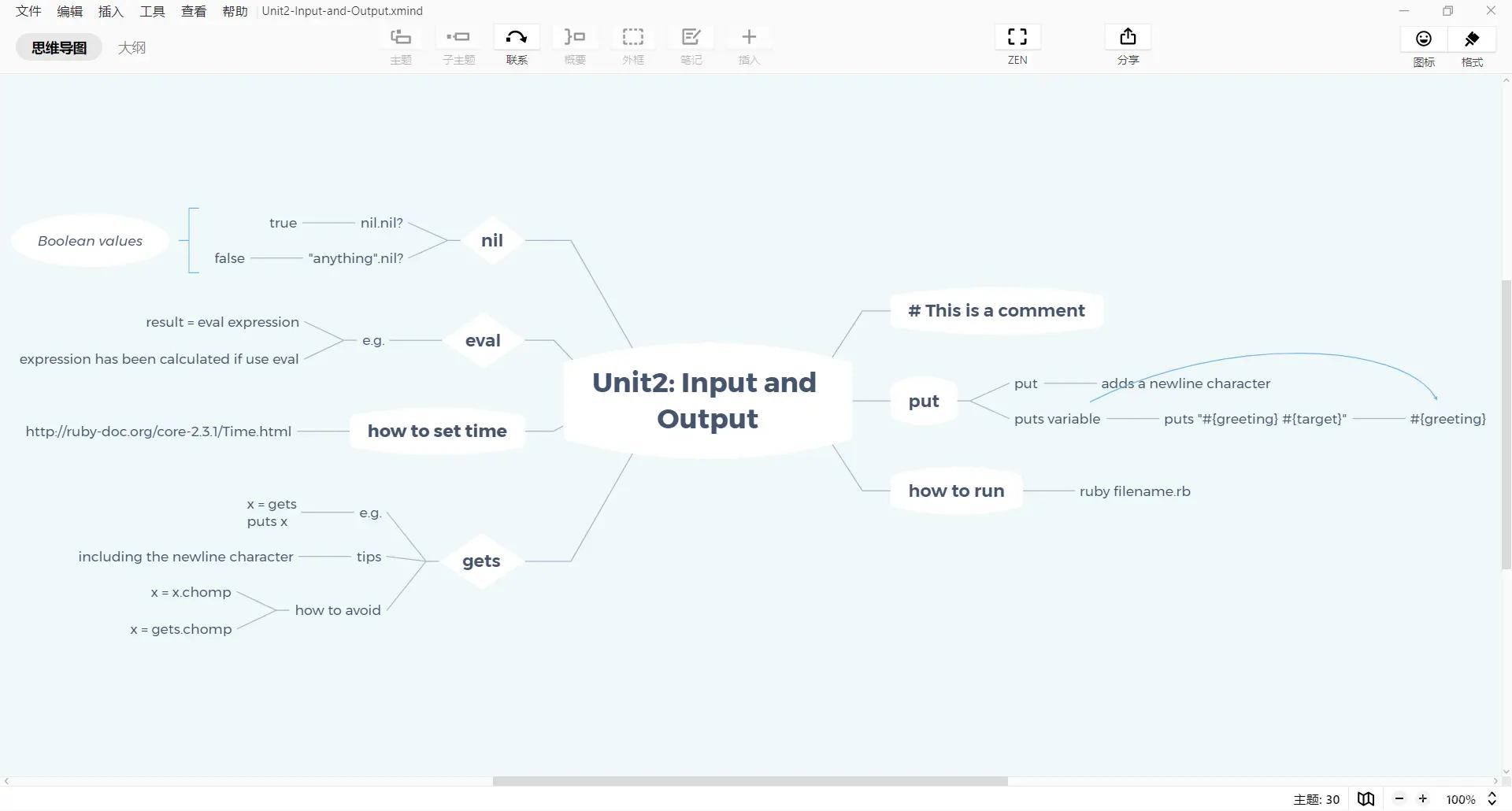

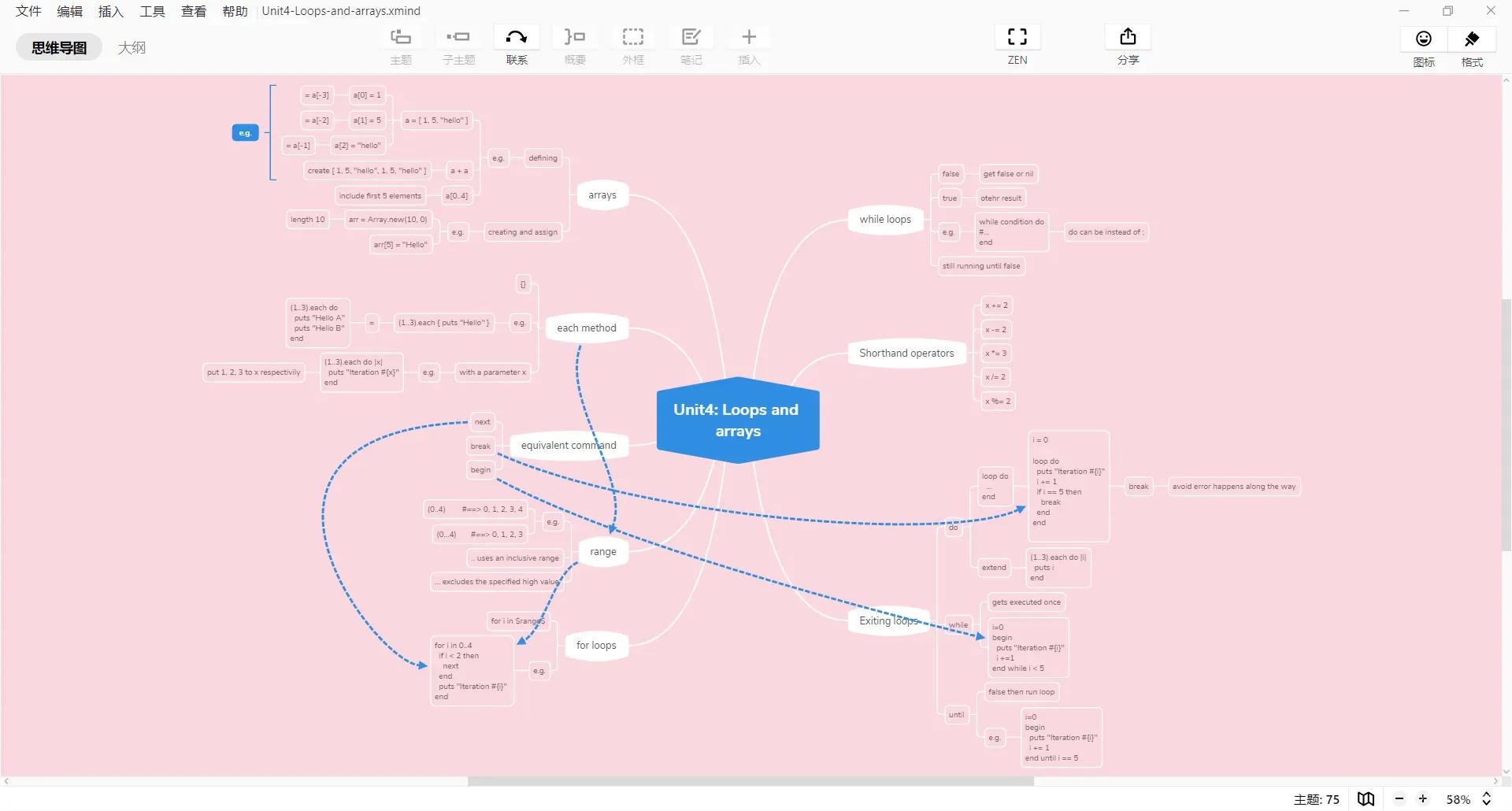
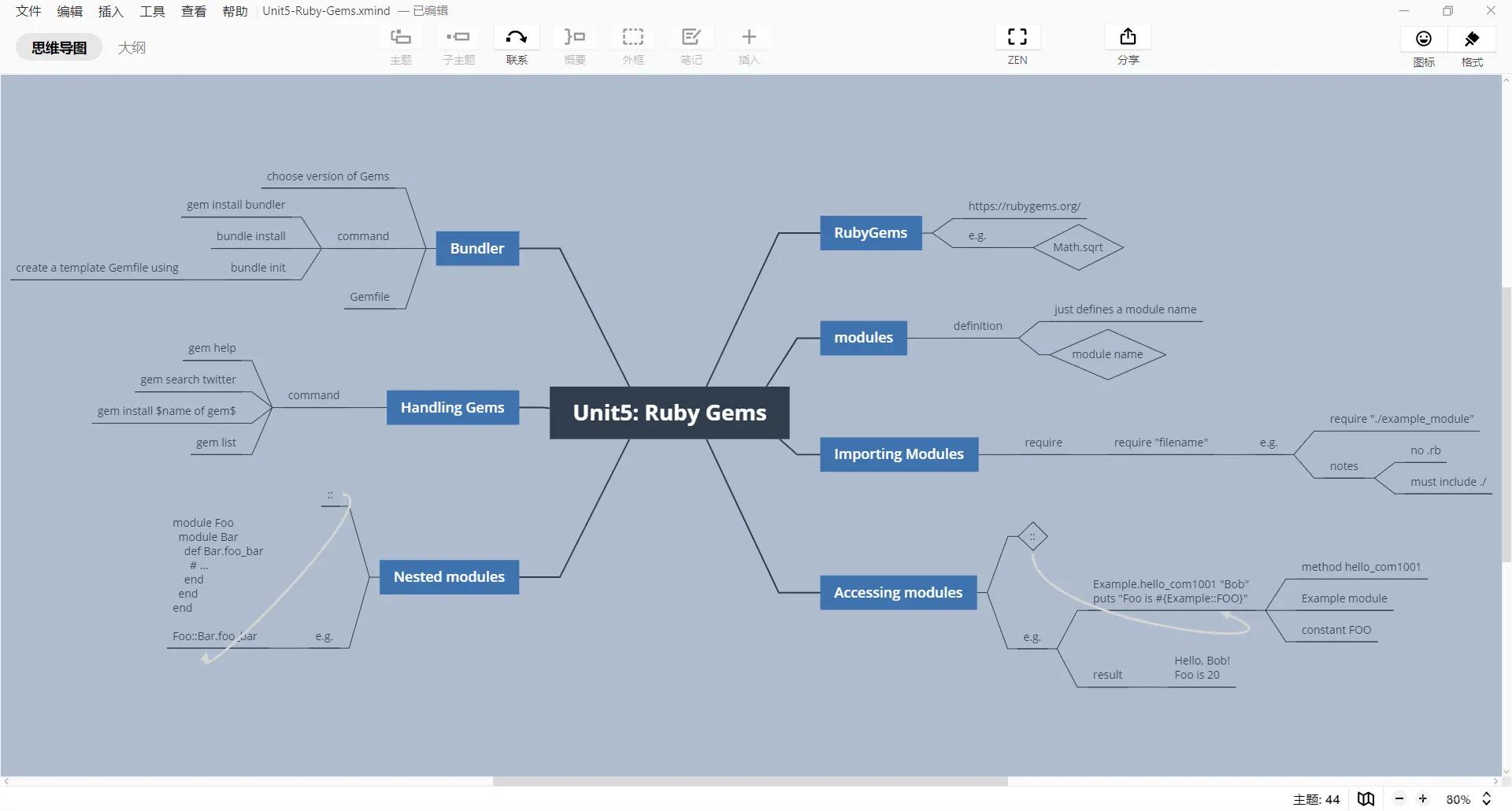
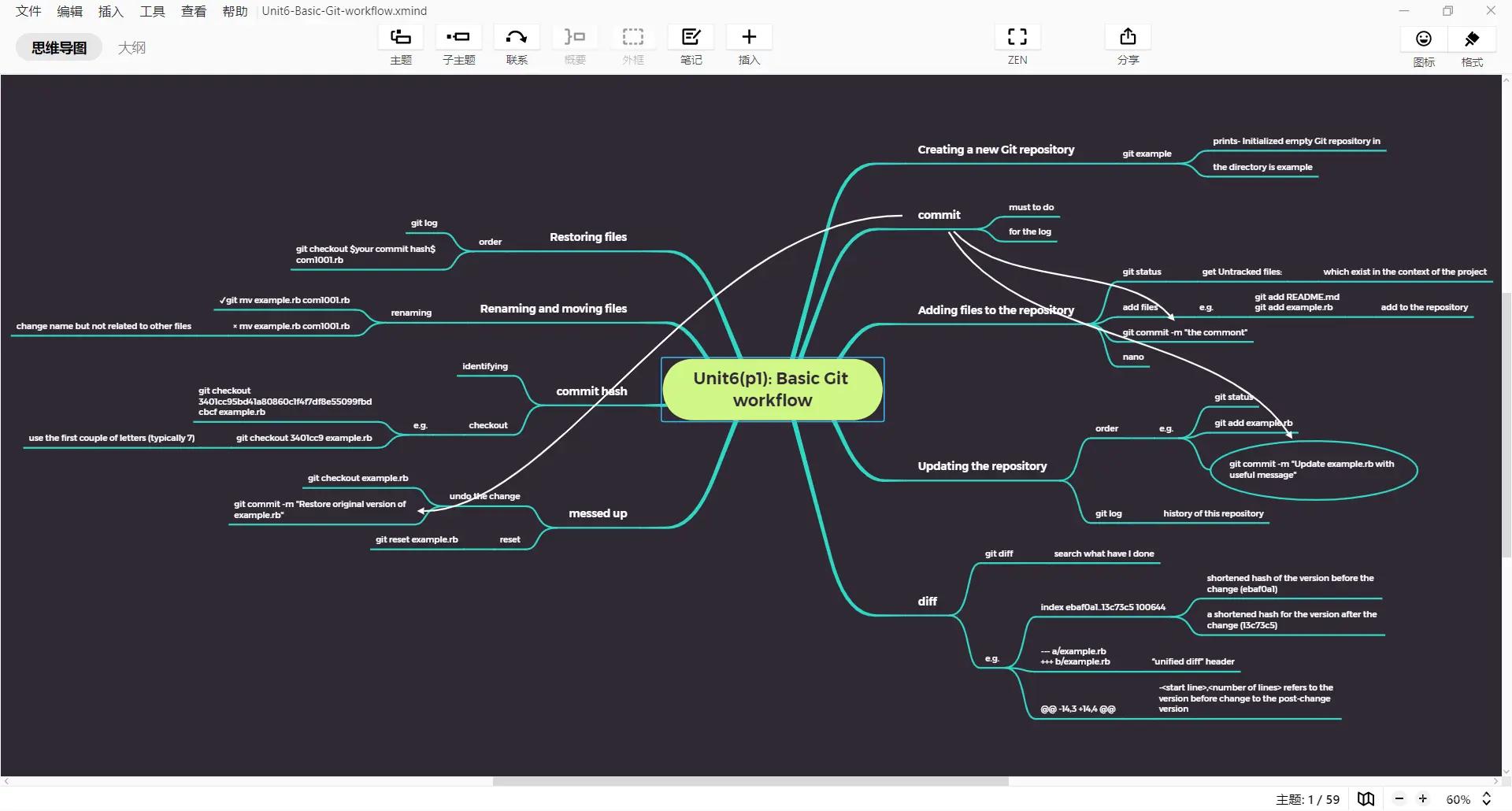
Ruby&Linux&git入门学习思维导图整理
废话 整理了一份非系统性的 Ruby&Linux&git 入门的思维导图,是根据Introduction to Software Engineering学科课程整理的,因为学科一部分是编程语言 Ruby 的学习,但更多是项目的实践,所以学习内容较杂乱,包括了最常见的 linux…